Einphasen- und Zweiphasen-Asynchronmotoren
Zweck, Gerät und Funktionsprinzip von Einphasen-Asynchronmotoren
Einphasen-Induktionsmotoren sind Maschinen mit geringer Leistung, die im Design ähnlichen Dreiphasen-Käfigläufermotoren ähneln.
Einphasige Asynchronmotoren unterscheiden sich von Drehstrommotoren durch die Statoranordnung, bei der sich in den Nuten des Magnetkreises eine zweiphasige Wicklung befindet, bestehend aus der Haupt- oder Arbeitsphase mit einem Phasenbereich von 120 El. Hagel und führt zu den mit C1 und C2 gekennzeichneten Anschlüssen sowie einer Hilfs- oder Startphase mit einem Phasenbereich von 60 el. Hagel und führt zu den mit B1 und B2 gekennzeichneten Anschlüssen (Abb. 1).
Die magnetischen Achsen dieser Wicklungsstränge sind um einen Winkel 0 = 90 el gegeneinander versetzt. Hagel. Eine an das Wechselspannungsnetz angeschlossene Arbeitsphase kann keine Drehung des Rotors bewirken, da ihr Strom ein magnetisches Wechselfeld mit fester Symmetrieachse anregt, das durch eine sich zeitlich harmonisch ändernde magnetische Induktion gekennzeichnet ist.
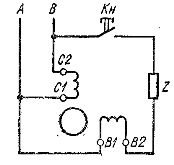
Reis. 1. Schaltplan eines einphasigen Käfigläufer-Induktionsmotors.
Dieses Feld kann durch zwei Komponenten dargestellt werden – identische kreisförmige Magnetfelder mit direkter und umgekehrter Reihenfolge, rotierend mit magnetischen Induktionen, rotierend in entgegengesetzte Richtungen mit der gleichen Geschwindigkeit. Wenn der Rotor jedoch in die erforderliche Richtung vorbeschleunigt wird, dreht er sich beim Einschalten der Arbeitsphase weiterhin in die gleiche Richtung.
 Aus diesem Grund beginnt der Start eines Einphasenmotors damit, dass der Rotor durch Drücken der Starttaste beschleunigt wird, wodurch in beiden Phasen der Statorwicklung Ströme erregt werden, die um einen Betrag phasenverschoben sind, der von den Parametern des Motors abhängt Phasenverschiebungseinrichtung Z in Form eines Widerstands, einer Induktivität oder eines Kondensators und elektrische Schaltungselemente, die die Betriebs- und Startphasen der Statorwicklung umfassen. Diese Ströme verursachen in der Maschine ein rotierendes Magnetfeld mit magnetischer Induktion im Luftspalt, das sich periodisch und monoton innerhalb der Maximal- und Minimalwerte ändert und dessen Vektorende eine Ellipse beschreibt.
Aus diesem Grund beginnt der Start eines Einphasenmotors damit, dass der Rotor durch Drücken der Starttaste beschleunigt wird, wodurch in beiden Phasen der Statorwicklung Ströme erregt werden, die um einen Betrag phasenverschoben sind, der von den Parametern des Motors abhängt Phasenverschiebungseinrichtung Z in Form eines Widerstands, einer Induktivität oder eines Kondensators und elektrische Schaltungselemente, die die Betriebs- und Startphasen der Statorwicklung umfassen. Diese Ströme verursachen in der Maschine ein rotierendes Magnetfeld mit magnetischer Induktion im Luftspalt, das sich periodisch und monoton innerhalb der Maximal- und Minimalwerte ändert und dessen Vektorende eine Ellipse beschreibt.
Es. Das elliptische rotierende Magnetfeld erfasst EMF und Ströme in den Drähten der kurzgeschlossenen Rotorwicklung, die im Zusammenwirken mit diesem Feld für die Beschleunigung des Rotors des Einphasenmotors in Drehrichtung des Feldes sorgen, und zwar erreicht in wenigen Sekunden nahezu die Nenngeschwindigkeit.
Durch Loslassen des Startknopfes wird der Elektromotor vom Zweiphasenbetrieb in den Einphasenbetrieb überführt, was zusätzlich durch die entsprechende Komponente des magnetischen Wechselfeldes unterstützt wird, das bei seiner Rotation aufgrund des Schlupfes dem rotierenden Rotor geringfügig vorauseilt.
Eine rechtzeitige Trennung der Anlaufphase der Statorwicklung eines Einphasen-Asynchronmotors vom Stromnetz ist aufgrund seiner Konstruktion erforderlich, die eine kurzfristige Betriebsweise vorsieht – in der Regel bis zu 3 s, was einen längeren Aufenthalt ausschließt unter Last aufgrund unzulässiger Überhitzung, Durchbrennen der Isolierung und Beschädigung.
Die Erhöhung der Betriebszuverlässigkeit von Einphasen-Asynchronmotoren wird durch die Einbettung eines Fliehkraftschalters mit Unterbrechungskontakten, die an die mit VT und B2 gekennzeichneten Klemmen angeschlossen sind, und eines Thermorelais mit ähnlichen Kontakten und den mit PT und C1 gekennzeichneten Klemmen in das Maschinengehäuse gewährleistet (Abb. 2, CD).
Der Fliehkraftschalter trennt automatisch die Startphase der Statorwicklung, die an die mit B1 und B2 gekennzeichneten Klemmen angeschlossen ist, wenn der Rotor eine Drehzahl nahe der Nenndrehzahl erreicht, und das Thermorelais trennt beide Phasen der Statorwicklung vom Netz, wenn die Heizung ausgeschaltet ist höher als zulässig.
Die Umkehr der Drehrichtung des Rotors wird erreicht, indem beim Starten die Richtung des Stroms in einer der Phasen der Statorwicklung geändert wird, indem der Startknopf umgeschaltet und die Metallplatte an den Anschlüssen des Elektromotors neu angeordnet wird (Abb. 2, a, b) oder nur durch Neuanordnung zweier gleichartiger Platten (Abb. 2, c, d).
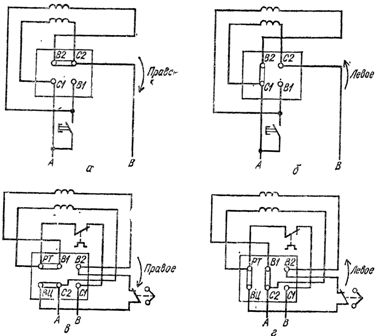
Reis. 2. Markierung der Anschlüsse der Phasen der Statorwicklung eines Einphasen-Asynchronmotors mit Eichhörnchenrotor und ihrer Verbindung für die Rotordrehung: a, c – rechts, b, d – links.
Vergleich der technischen Eigenschaften von Einphasen- und Dreiphasen-Asynchronmotoren
Einphasige Asynchronmotoren unterscheiden sich von dreiphasigen Maschinen mit ähnlicher Nennleistung durch einen reduzierten Anfangsdrehmomentfaktor kn = МХ / Mnom und einen erhöhten Anfangsstromfaktor ki = Mi / Mnom, die für einphasige Elektromotoren mit einer Anfangsphase gelten der Statorwicklung mit erhöhtem Gleichstromwiderstand und geringerer Induktivität der Arbeitsphase sind wichtig kn — 1,0 — 1,5 und ki = 5 — 9.
Die Anlaufeigenschaften von Einphasen-Asynchronmotoren sind schlechter als die von Dreiphasen-Asynchronmotoren, da beim Anlauf von Einphasenmaschinen ein elliptisches rotierendes Magnetfeld mit einer Anfangsphase der Statorwicklung gleich zwei erregt wird Ungleichmäßige kreisförmig rotierende Magnetfelder – direkt und umgekehrt – bewirken eine Bremswirkung.
 Durch die Auswahl der Parameter der Elemente der Stromkreise der Arbeits- und Startphase der Statorwicklung ist es möglich, die Anregung eines kreisförmigen rotierenden Magnetfelds beim Start sicherzustellen, was mit einem phasenverschiebenden Element möglich ist in Form eines Kondensators mit geeigneter Kapazität.
Durch die Auswahl der Parameter der Elemente der Stromkreise der Arbeits- und Startphase der Statorwicklung ist es möglich, die Anregung eines kreisförmigen rotierenden Magnetfelds beim Start sicherzustellen, was mit einem phasenverschiebenden Element möglich ist in Form eines Kondensators mit geeigneter Kapazität.
Da die Beschleunigung des Rotors eine Änderung der Parameter der Maschinenkreise verursacht, ändert sich das rotierende Magnetfeld von kreisförmig zu elliptisch, wodurch sich die Starteigenschaften des Motors verschlechtern. Daher wird bei einer Drehzahl von ca. 0,8 Nenndrehzahl die Anlaufphase der Statorwicklung des Elektromotors manuell oder automatisch abgeschaltet, wodurch der Motor auf Einphasenbetrieb umschaltet.
Einphasen-Asynchronmotoren mit Anlaufkondensator haben ein Vielfaches des Anlaufmoments kp = 1,7 – 2,4 und ein Vielfaches des Anlaufstroms ki = 3 – 5.
Zweiphasen-Asynchronmotoren
Bei zweiphasigen Asynchronmotoren sind die beiden Phasen der Statorwicklung mit Phasenflächen von 90 el. Grüße sind die Arbeiter. Sie liegen in den Nuten des Magnetkreises des Stators, sodass ihre Magnetachsen einen Winkel von 90 el bilden. Hagel. Diese Phasen der Statorwicklung unterscheiden sich nicht nur in der Anzahl der Windungen, sondern auch in den Nennspannungen und -strömen, obwohl ihre Gesamtleistungen im Nennmodus des Motors gleich sind.
In einer der Phasen der Statorwicklung befindet sich ein Permanentkondensator Cp (Abb. 3, a), der unter den Bedingungen des Nennmodus des Motors für die Erregung eines kreisförmigen rotierenden Magnetfelds sorgt. Die Kapazität dieses Kondensators wird durch die Formel bestimmt:
° Cp = I1sinφ1 / 2πfUn2
wobei I1 und φ1 jeweils der Strom und die Phasenverschiebung zwischen Spannung und Strom des Phasenkreises der Statorwicklung ohne Kondensator in einem kreisförmig rotierenden Magnetfeld sind, I und ti die Frequenz des Wechselstroms und die Spannung der Versorgung Netzwerk bzw. n- Transformationskoeffizient – das Verhältnis der effektiven Windungszahlen der Phasen der Statorwicklung, jeweils mit und ohne Kondensator, bestimmt durch die Formel
n = kvol2 w2 / ktom 1 w1
wobei коб2 und коб1 die Wicklungskoeffizienten der entsprechenden Phasen der Statorwicklung mit der Windungszahl w2 und w1 sind.
Die Kondensatorklemmenspannung Uc liegt in Reihe zum Wicklungsstrang eines Zweiphasen-Induktionsmotors mit kreisförmigem rotierendem Magnetfeld über der Netzspannung U und wird wie folgt ermittelt:
Uc = U √1 + n2
Der Übergang zu einer anderen als der Nennlast des Motors geht mit einer Änderung des rotierenden Magnetfelds einher, das nicht mehr kreisförmig, sondern elliptisch wird.Dadurch verschlechtern sich die Betriebseigenschaften des Motors und beim Anlassen verringert sich die Anfangsleistung Anlaufdrehmoment auf MP <0,3 Mnom, wodurch die Verwendung von permanent angeschlossenen Kondensatormotoren nur in Installationen mit milden Startbedingungen eingeschränkt wird.
Um das Anfangsdrehmoment zu erhöhen, wird der Startkondensator Cn parallel zum Arbeitskondensator Cp geschaltet (Abb. 3, b), dessen Kapazität viel größer ist als die Kapazität des Arbeitskondensators und von der Einstellung des Anfangsstarts abhängt Drehmoment, das auf zwei oder mehr erhöht werden kann.
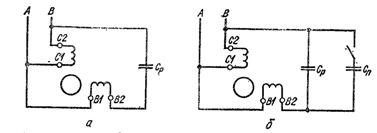
Reis. 3. Schemata zum Einschalten von Zweiphasen-Asynchronmotoren mit Käfigläufer: a – mit fest angeschlossenem Kondensator, b – mit Betriebs- und Anlaufkondensator.
Nachdem der Rotor auf eine Drehzahl von 0,6 bis 0,7 des Nennstartkondensators beschleunigt wurde, wird er abgeschaltet, um den Übergang eines kreisförmigen rotierenden Magnetfelds in ein elliptisches zu vermeiden, was den Betrieb des Motors beeinträchtigt.
Der Anlaufmodus solcher Kondensatormotoren ist durch folgende Parameter gekennzeichnet: kn = 1,7 – 2,4 und ki = 4 – 6.
Kondensatormotoren zeichnen sich durch bessere Energieeigenschaften als Einphasenmotoren mit einem anfänglichen Schleier auf der Statorwicklung aus und ihr Leistungsfaktor ist dank der Verwendung von Kondensatoren höher als der von Dreiphasenmotoren gleicher Leistung.
Universelle Asynchronmotoren
Automatische Steuerungsanlagen verwenden universelle Asynchronmotoren – dreiphasige Maschinen mit geringer Leistung, die an ein dreiphasiges oder einphasiges Netzwerk angeschlossen sind. Bei Stromversorgung aus einem Einphasennetz sind die Anlauf- und Betriebseigenschaften von Motoren etwas schlechter als bei Verwendung im Dreiphasenbetrieb.
Universelle Asynchronmotoren der UAD-Serie werden zwei- und vierpolig hergestellt, die im Dreiphasenmodus eine Nennleistung von 1,5 bis 70 W und im Einphasenmodus von 1 bis 55 W haben und mit Wechselstrom betrieben werden Spannungsnetz mit einer Frequenz von 50 Hz mit einem Wirkungsgrad η= 0,09 — 0,65.
Einphasen-Asynchronmotoren mit Spalt- oder Spaltpolen
Bei einphasigen Induktionsmotoren mit geteilten oder schattierten Polen ist jeder Pol durch eine tiefe Nut in zwei ungleiche Teile geteilt und trägt eine einphasige Wicklung, die den gesamten Magnetkreis des Pols abdeckt, sowie kurzgeschlossene Windungen, die sich in seinem kleineren Teil befinden.
Der Rotor dieser Motoren verfügt über eine Kurzschlusswicklung. Die Einbeziehung der Statorwicklung in eine sinusförmige Spannung geht mit der Bildung eines Stroms darin und der Erregung eines magnetischen Wechselfelds mit fester Symmetrieachse einher, das die entsprechenden EMK und Ströme in den kurzgeschlossenen Schleifen induziert.
Unter dem Einfluss von Kurzschlussströmen regen die entsprechenden M.D.s ein Magnetfeld an, das die Verstärkung und Schwächung des Hauptmagnetfeldes in abgeschirmten Hauptpolen verhindert. Die Magnetfelder der abgeschirmten und ungeschirmten Teile der Pole sind zeitlich phasenverschoben und bilden räumlich verschoben das resultierende elliptische rotierende Magnetfeld, das sich in Richtung von der Magnetachse des ungeschirmten Teils des Pols zur Magnetachse bewegt seines abgeschirmten Teils.
Die Wechselwirkung dieses Feldes mit den in der Rotorwicklung induzierten Strömen führt zum Auftreten des Anfangsdrehmoments Mn = (0,2 - 0,6) Mnom und zur Beschleunigung des Rotors auf die Nenndrehzahl, wenn das auf die Motorwelle ausgeübte Bremsmoment nicht auftreten sollte das Anlaufdrehmoment überschreiten.
Um den anfänglichen Anlauf und das maximale Drehmoment von Einphasen-Asynchronmotoren mit geteilten oder schattierten Polen zu erhöhen, werden zwischen ihren Polen magnetische Nebenschlüsse aus Stahlblech angebracht, die das rotierende Magnetfeld näher an die Kreisform bringen.
Spaltpolmotoren sind nicht umkehrbare Geräte, die häufige Starts und plötzliche Stopps ermöglichen und über lange Zeit verzögert werden können. Sie werden mit zwei- und vierpoliger Nennleistung von 0,5 bis 30 W und in verbesserter Ausführung bis 300 W für den Betrieb an einem Wechselspannungsnetz mit einer Frequenz von 50 Hz mit einem Wirkungsgrad von ηnom = 0,20 – 0,40 hergestellt.
Lesen Sie auch: Selsyns: Zweck, Gerät, Wirkprinzip
