Automatische Steuerschaltungen zum Starten und Stoppen von Gleichstrommotoren
 Das Starten eines Motors wird von bestimmten Schaltern im Stromkreis und im Steuerkreis begleitet. In diesem Fall werden Relais-Schütze und berührungslose Geräte verwendet. Für Gleichstrommotoren zur Begrenzung Anlaufströme Im Rotor- und Ankerkreis der Motoren sind Anlaufwiderstände enthalten, die bei stufenweiser Beschleunigung der Motoren abgeschaltet werden. Wenn der Startvorgang abgeschlossen ist, werden die Startwiderstände vollständig überbrückt.
Das Starten eines Motors wird von bestimmten Schaltern im Stromkreis und im Steuerkreis begleitet. In diesem Fall werden Relais-Schütze und berührungslose Geräte verwendet. Für Gleichstrommotoren zur Begrenzung Anlaufströme Im Rotor- und Ankerkreis der Motoren sind Anlaufwiderstände enthalten, die bei stufenweiser Beschleunigung der Motoren abgeschaltet werden. Wenn der Startvorgang abgeschlossen ist, werden die Startwiderstände vollständig überbrückt.
Auch der Bremsvorgang der Motoren kann automatisiert werden. Nach dem Stoppbefehl werden mit Hilfe der Relais-Schütz-Ausstattung die notwendigen Schaltungen in den Stromkreisen vorgenommen. Bei Annäherung an eine Drehzahl nahe Null wird der Motor vom Netz getrennt. Während des Startvorgangs werden Schritte in regelmäßigen Abständen oder abhängig von anderen Parametern abgeschaltet. Dadurch ändern sich Strom und Drehzahl des Motors.
Die Steuerung des Motorstarts erfolgt in Abhängigkeit von EMK (oder Geschwindigkeit), Strom, Zeit und Weg.
Typische Baugruppen und Schaltungen zur automatischen Anlaufsteuerung von Gleichstrommotoren
Der Start eines Gleichstrommotors mit paralleler oder unabhängiger Erregung erfolgt über einen in den Ankerkreis eingefügten Widerstand. Zur Begrenzung des Einschaltstroms ist ein Widerstand erforderlich. Wenn der Motor beschleunigt, wird der Startwiderstand erhöht. Wenn der Start abgeschlossen ist, wird der Widerstand vollständig umgangen und der Motor kehrt zu seinen natürlichen mechanischen Eigenschaften zurück (Abb. 1). Beim Start beschleunigt der Motor nach der künstlichen Kennlinie 1, dann 2 und nach dem Manövrieren des Widerstands – nach der natürlichen Kennlinie 3.
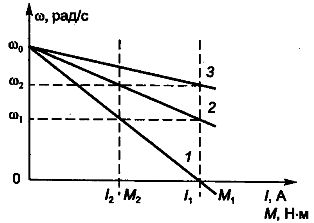
Reis. 1. Mechanische und elektromechanische Eigenschaften eines Gleichstrommotors mit paralleler Erregung (ω – Winkelgeschwindigkeit der Drehung; I1 M1 – Spitzenstrom und Drehmoment des Motors; I2 M2 – Strom und Schaltmoment)
Betrachten Sie den Startkreisknoten des Gleichstrommotors (DCM) in der EMF-Funktion (Abb. 2).
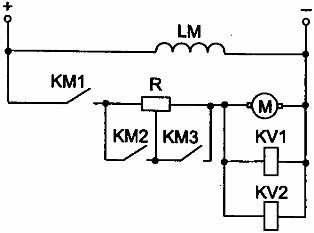
Reis. 2. Der Startkreisknoten des DCT der parallelen Erregung in der EMF-Funktion
Die EMF-Funktion (oder Geschwindigkeitsfunktion) wird durch Relais, Spannungen und Schütze gesteuert. Spannungsrelais sind so konfiguriert, dass sie bei unterschiedlichen Anker-EMK-Werten arbeiten. Beim Einschalten des Schützes KM1 reicht die Spannung des KV-Relais zum Zeitpunkt des Starts nicht für den Betrieb aus. Wenn der Motor beschleunigt (aufgrund der Erhöhung der Motor-EMK), wird das KV1-Relais aktiviert, dann KV2 (die Relaisaktivierungsspannungen haben entsprechende Werte); Sie umfassen die Beschleunigungsschütze KM2, KMZ und die Widerstände im Ankerkreis sind überbrückt (Schützschaltkreise sind im Diagramm nicht dargestellt; LM ist die Erregerwicklung).
Schauen wir uns das Schema zum Starten eines Gleichstrommotors in der EMF-Funktion an (Abb. 3). Die Winkelgeschwindigkeit des Motors wird häufig indirekt festgelegt, d. h.Messung geschwindigkeitsbezogener Größen. Bei einem Gleichstrommotor ist ein solcher Wert die EMF. Der Start erfolgt wie folgt. Der QF-Leistungsschalter schaltet ein, das Motorfeld wird an die Stromversorgung angeschlossen. Das KA-Relais aktiviert und schließt seinen Kontakt.
Die übrigen Geräte der Schaltung bleiben an ihrer ursprünglichen Position. Um den Motor zu starten, müssen Sie Drücken Sie den Knopf SB1 „Start“, danach wird das Schütz KM1 aktiviert und verbindet den Motor mit der Stromquelle. Das Schütz KM1 ist selbstversorgt. Der Gleichstrommotor wird mit dem Motorankerkreiswiderstand R beschleunigt.
Mit zunehmender Drehzahl des Motors steigen seine EMK und die Spannung in den Spulen der Relais KV1 und KV2. Bei der Geschwindigkeit ω1 (siehe Abb. 1.) wird das Relais KV1 aktiviert. Es schließt seinen Kontakt im Schützkreis KM2, der mit seinem Kontakt die erste Stufe des Anlaufwiderstands auslöst und kurzschließt. Bei Drehzahl ω2 ist das Relais KV2 erregt. Mit seinem Kontakt schließt es den Versorgungsstromkreis des KMZ-Schützes, das bei Betätigung mit einem Kontakt die zweite Startstufe des Startwiderstands kurzschließt. Der Motor erreicht seine natürlichen mechanischen Eigenschaften und beendet den Start.
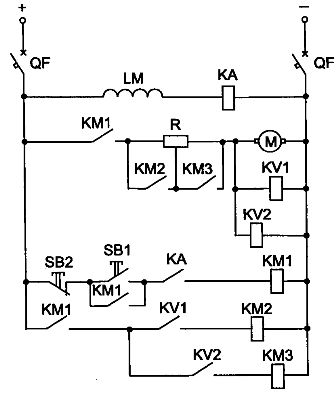
Reis. 3. Schematische Darstellung des Start-DCT der parallelen Anregung in der EMF-Funktion
Für den korrekten Betrieb der Schaltung ist es notwendig, das Spannungsrelais KV1 auf den Betrieb bei der EMK entsprechend der Drehzahl ω1 und das Relais KV2 auf den Betrieb bei der Drehzahl ω2 einzustellen.
Um den Motor zu stoppen, drücken Sie die Stopptaste SB2. Um den Stromkreis zu trennen, öffnen Sie den QF-Leistungsschalter.
Die Stromfunktion wird durch ein Stromrelais gesteuert. Betrachten Sie den Knoten des Gleichstrommotor-Starterkreises in der Flussfunktion. Im Diagramm in Abb.In 4 werden Überstromrelais eingesetzt, die beim Einschaltstrom I1 anziehen und beim Minimalstrom I2 abfallen (siehe Abb. 1). Die interne Ansprechzeit der Stromrelais muss kleiner sein als die Ansprechzeit der Schütze.
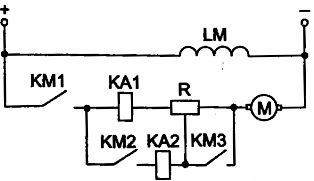
Reis. 4. Der Startkreisknoten des parallelen Erreger-DCT in Abhängigkeit vom Strom
Die Motorbeschleunigung beginnt, wenn der Widerstand vollständig in den Ankerkreis eingefügt ist. Beim Beschleunigen des Motors nimmt der Strom ab, bei Strom I2 verschwindet das Relais KA1 und schließt mit seinem Kontakt den Versorgungsstromkreis des Schützes KM2, das mit seinem Kontakt den ersten Kontakt des Anlaufwiderstands überbrückt. Ebenso wird die zweite Startstufe des Widerstands kurzgeschlossen (Relais KA2, Schütz KMZ). Die Stromkreise der Schütze sind im Diagramm nicht dargestellt. Am Ende des Motorstarts wird der Widerstand im Ankerkreis überbrückt.
Betrachten Sie die Schaltung zum Starten eines Gleichstrommotors als Flussfunktion (Abb. 5). Die Widerstände der Widerstandsstufen sind so gewählt, dass zum Zeitpunkt des Einschaltens des Motors und des Überbrückens der Stufen der Strom I1 im Ankerkreis und das Moment M1 den zulässigen Wert nicht überschreiten.
Starten eines Gleichstrommotors erfolgt durch Einschalten des QF-Leistungsschalters und Drücken der „Start“-Taste SB1. In diesem Fall wird das Schütz KM1 aktiviert und schließt seine Kontakte. Der Einschaltstrom I1 fließt durch den Leistungskreis des Motors, unter dessen Einfluss das Überstromrelais KA1 aktiviert wird. Sein Kontakt öffnet sich und das Schütz KM2 erhält keinen Strom.
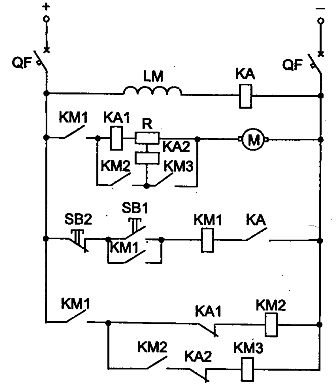
Reis. 5. Schematische Darstellung des DCT-Starts mit paralleler Erregung als Funktion des Stroms
Sinkt der Strom auf den Minimalwert I2, fällt das Überstromrelais KA1 ab und schließt seinen Kontakt.Das Schütz KM2 wird aktiviert und überbrückt über seinen Hauptkontakt den ersten Abschnitt des Anlaufwiderstands und das Relais KA1. Beim Schalten steigt der Strom auf den Wert I1.
Wenn der Strom wieder auf den Wert I1 ansteigt, schaltet das Schütz KM1 nicht ein, da seine Spule vom Kontakt KM2 umgangen wird. Unter dem Einfluss des Stroms I1 wird das Relais KA2 aktiviert und öffnet seinen Kontakt. Sinkt der Strom im Beschleunigungsvorgang wieder auf den Wert I2, fällt das Relais KA2 ab und das Schütz KMZ schaltet ein. Der Start ist abgeschlossen, der Motor arbeitet mit seinen natürlichen mechanischen Eigenschaften.
Für die korrekte Funktion der Schaltung ist es erforderlich, dass die Ansprechzeit der Relais KA1 und KA2 kürzer ist als die Ansprechzeit der Schütze. Um den Motor zu stoppen, drücken Sie die „Stopp“-Taste SB2 und schalten Sie den QF-Leistungsschalter aus, um den Stromkreis zu trennen.
Die Zeitsteuerung erfolgt über ein Zeitrelais und entsprechende Schütze, die mit ihren Kontakten die Widerstandsstufen kurzschließen.
Betrachten Sie den Startkreisknoten Gleichstrommotor als Funktion der Zeit (Abb. 6). Das Zeitrelais KT wird sofort aktiviert, wenn über den Öffnungskontakt KM1 Spannung im Steuerkreis auftritt. Nach dem Öffnen des Kontakts KM1 verliert das Zeitrelais KT seine Spannungsversorgung und schließt zeitverzögert seinen Kontakt. Das Schütz KM2 erhält nach einer Zeitspanne, die der Zeitverzögerung des Zeitrelais entspricht, Strom, schließt seinen Kontakt und überbrückt den Widerstand im Ankerkreis.
Reis. 6. Der DCT-Startschaltungsknoten der parallelen Erregung als Funktion der Zeit
Zu den Vorteilen der Steuerung in Abhängigkeit von der Zeit gehören die einfache Steuerung, die Stabilität des Beschleunigungs- und Verzögerungsprozesses und die fehlende Verzögerung des Elektroantriebs bei mittleren Geschwindigkeiten.
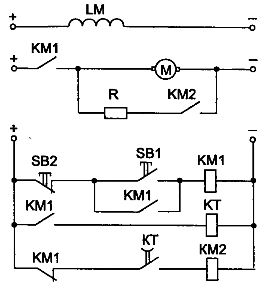
Betrachten Sie die Schaltung zum Starten der parallelen Erregung eines Gleichstrommotors als Funktion der Zeit. In Abb. In Abb. 7 zeigt ein Diagramm eines irreversiblen Start-Gleichstrom-Parallelerregungsmotors. Der Start erfolgt in zwei Etappen. Die Schaltung verwendet die Tasten SB1 „Start“ und SB2 „Stopp“, Schütze KM1 ... KMZ, elektromagnetische Zeitrelais KT1, KT2. Der QF-Schutzschalter schaltet sich ein. In diesem Fall erhält die Spule des Zeitrelais KT1 Strom und öffnet ihren Kontakt im Stromkreis des Schützes KM2. Der Motor wird durch Drücken der «Start»-Taste SB1 gestartet. Das Schütz KM1 erhält Strom und verbindet mit seinem Hauptkontakt den Motor über einen Widerstand im Ankerkreis mit einer Stromquelle.
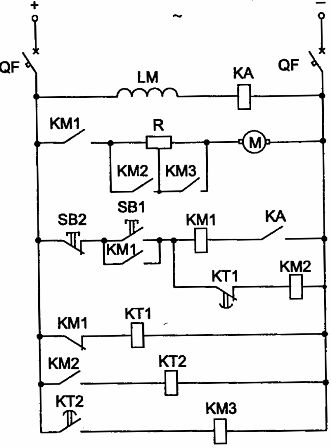
Reis. 7. Schematische Darstellung des irreversiblen Anlaufs eines Gleichstrommotors als Funktion der Zeit
Das Unterstromrelais KA dient zum Schutz des Motors vor Unterbrechung des Erregerkreises. Im Normalbetrieb zieht das KA-Relais an und sein Kontakt im Schaltkreis des KM1-Schützes schließt, wodurch das KM1-Schütz für den Betrieb vorbereitet wird. Wenn der Erregerkreis unterbrochen wird, schaltet das KA-Relais ab, öffnet seinen Kontakt, dann schaltet das KM1-Schütz ab und der Motor stoppt. Beim Betätigen des Schützes KM1 schließt dessen Sperrkontakt und der Kontakt KM1 im Relaiskreis KT1 öffnet, der zeitverzögert abschaltet und seinen Kontakt schließt.
Nach einer Zeitspanne, die der Zeitverzögerung des Relais KT1 entspricht, wird der Versorgungskreis des Beschleunigungsschützes KM2 geschlossen, der ausgelöst wird und mit seinem Hauptkontakt eine Stufe des Anlaufwiderstands kurzschließt. Gleichzeitig wird das Zeitrelais KT2 erregt. Der Motor beschleunigt. Nach einer Zeitspanne, die der Verzögerung des KT2-Relais entspricht, schließt der KT2-Kontakt, das KMZ-Beschleunigungsschütz wird aktiviert und kontaktiert mit seinem Hauptkontakt die zweite Stufe des Anlaufwiderstands im Ankerkreis. Der Start ist abgeschlossen und der Motor kehrt zu seinen natürlichen mechanischen Eigenschaften zurück.
Typische DC-Bremssteuerkreiseinheiten
Automatische Steuerungssysteme für Gleichstrommotoren nutzen dynamisches Bremsen, Gegenbremsen und regeneratives Bremsen.
Beim dynamischen Bremsen ist es erforderlich, die Ankerwicklung des Motors auf einen zusätzlichen Widerstand zu schließen und die Erregerwicklung bestromt zu lassen. Dieses Abbremsen kann geschwindigkeitsabhängig und zeitabhängig erfolgen.
Die geschwindigkeitsabhängige Regelung (EMF) beim dynamischen Bremsen kann nach dem in Abb. 1 dargestellten Schema erfolgen. 8. Beim Ausschalten des Schützes KM1 wird der Motoranker vom Netz getrennt, zum Zeitpunkt der Trennung liegt jedoch Spannung an seinen Klemmen an. Das Spannungsrelais KV zieht an und schließt seinen Kontakt im Stromkreis des Schützes KM2, der mit seinem Kontakt den Anker des Motors an den Widerstand R schließt.
Bei Drehzahlen nahe Null verliert das KV-Relais an Leistung. Die weitere Verzögerung von der Mindestgeschwindigkeit bis zum vollständigen Stillstand erfolgt unter der Wirkung eines statischen Widerstandsmoments.Um die Bremswirkung zu erhöhen, können zwei oder drei Bremsstufen angewendet werden.
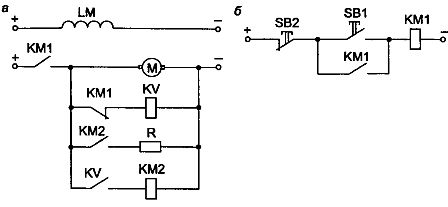
Reis. 8. Knoten des Stromkreises zur automatischen Steuerung des dynamischen Bremsens in der EMF-Funktion: a – Stromkreis; b – Steuerkreis
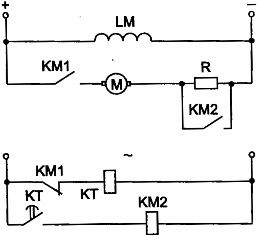
Die dynamische Bremsung mit konstanter motorunabhängiger Erregung als Funktion der Zeit erfolgt nach dem in Abb. 1 dargestellten Schema. neun.
Reis. 9. Knoten des DCT-Dynamikbremskreises mit unabhängiger Erregung als Funktion der Zeit
Bei laufendem Motor ist das Zeitrelais KT angezogen, der Stromkreis des Bremsschützes KM2 ist jedoch geöffnet. Zum Anhalten müssen Sie die „Stop“-Taste SB2 drücken. Schütz KM1 und Zeitrelais KT verlieren Strom; Das Schütz KM2 wird aktiviert, da der Kontakt KM1 im Stromkreis des Schützes KM2 schließt und der Kontakt des Zeitrelais KT zeitverzögert öffnet.
Zur Zeitsteuerung des Zeitrelais erhält das Schütz KM2 Strom, schließt seinen Kontakt und verbindet den Motoranker mit dem Zusatzwiderstand R. Es erfolgt ein dynamischer Stopp des Motors. Am Ende öffnet das KT-Relais nach einiger Zeit seinen Kontakt und trennt das KM2-Schütz vom Netzwerk. Die weitere Abbremsung bis zum Stillstand erfolgt unter dem Einfluss des Widerstandsmoments Ms.
Beim Rückwärtsbremsen wirken die EMK des Motors und die Netzspannung aufeinander abgestimmt. Um den Strom zu begrenzen, wird ein Widerstand in den Stromkreis eingefügt.
Erregungssteuerung von Gleichstrommotoren
Die Feldwicklung des Motors weist eine erhebliche Induktivität auf und wenn der Motor schnell abgeschaltet wird, kann an ihr eine große Spannung auftreten, die dazu führt, dass die Isolierung der Wicklung zusammenbricht. Um dies zu verhindern, können Sie die in Abb. gezeigten Schaltungsknoten verwenden.10. Der Löschwiderstand wird parallel zur Erregerspule über die Diode eingeschaltet (Abb. 10, b). Daher fließt der Strom nach dem Ausschalten für kurze Zeit durch den Widerstand (Abb. 10, a).

Reis. 10. Knoten der Schaltkreise zum Einschalten von Löschwiderständen: a – Löschwiderstände sind parallel geschaltet; b — Der Löschwiderstand wird über die Diode eingeschaltet.
Der Schutz vor Unterbrechung des Erregerkreises erfolgt mit einem Unterstromrelais gemäß dem in Abb. 1 dargestellten Schema. elf.

Reis. 11. Schutz gegen Unterbrechung des Erregerkreises: a – Leistungserregerkreis; b – Steuerkreis
Bei einem Bruch der Erregerspule fällt das Relais KA ab und unterbricht den Stromkreis des Schützes KM.