Elektrischer Antrieb von Elektrohebezeugen und Kranbalken
 Hängende Elektrofahrwerke (elektrische Hebezeuge, Hebezeuge und Kranträger) werden zum Heben und Bewegen von Lasten und Maschinenteilen bei Montage- und Reparaturarbeiten in Industriehallen eingesetzt. Elektrische Hebezeuge, Hebezeuge und Kräne sind kleiner als Brückenkrane, wodurch sich die Größe von Industriegebäuden verringert und für deren Wartung kein qualifiziertes Personal erforderlich ist.
Hängende Elektrofahrwerke (elektrische Hebezeuge, Hebezeuge und Kranträger) werden zum Heben und Bewegen von Lasten und Maschinenteilen bei Montage- und Reparaturarbeiten in Industriehallen eingesetzt. Elektrische Hebezeuge, Hebezeuge und Kräne sind kleiner als Brückenkrane, wodurch sich die Größe von Industriegebäuden verringert und für deren Wartung kein qualifiziertes Personal erforderlich ist.
Elektrische Hängewagen sind für das Heben und Bewegen von Gütern in Produktionsanlagen entlang einer genau definierten Strecke konzipiert.
Ein Elektrostapler (Abb. 1) besteht aus drei Hauptteilen: einem Hebemechanismus (elektrisches Hebezeug) zum Heben (Senken) und Halten der Last, einem Bewegungsmechanismus (Fahrgestell) zum Bewegen der angehobenen Last in eine genau definierte Positionsrichtung , eine Einschienenbahn, die horizontale Bewegung in zwei Richtungen definiert.
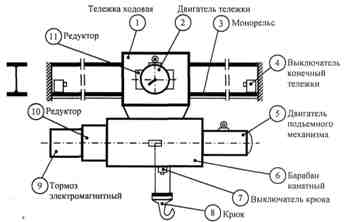
Reis. 1. Kinematisches Diagramm des hängenden Elektrowagens
Das elektrische Hebezeug ist auf einem Arbeitswagen montiert und umfasst die folgende Ausrüstung: Elektromotor (5) des Hebemechanismus, zylindrisches Getriebe (10) zur Reduzierung der Drehzahl des Elektromotors auf einen Wert, der eine bestimmte lineare Geschwindigkeit von liefert Heben (Senken) des Hakens, elektromagnetische Bremse (9), um den Motor der Welle zu stoppen, wenn er vom Netz getrennt wird oder die Spannung im Netz verschwindet, wird eine Bremsbremse aktiviert, die auf die Kraft der Federn wirkt, wenn die Wellen sind um die Welle gewickelt, der Endschalter (7) des Hakens, um das Anheben des Hakens zu begrenzen, beim Drücken wird der Motor vom Netz getrennt und verlangsamt sich, die Seiltrommel (6) zum Aufwickeln ( Abwickeln) und Aufbewahren des Seils, dem Haken (8), zur Sicherung der angehobenen Last.
Das Fahrwerk ist auf der Einschienenbahn (3) montiert und wird von den Laufrädern an den unteren Flanschen der Doppelschiene getragen. Antrieb der Räder über ein zylindrisches Getriebe (11) durch einen Elektromotor (2).
Einschienenbahn – I-Träger mit Endschaltern (4) an den Enden zur Begrenzung der horizontalen Bewegung.
Das elektrische Hebezeug TEP-1 (Tragfähigkeit 1 t, Spannung 380 V) besteht aus Hebe- und Bewegungsmechanismen mit einzelnen Elektroantrieben. Die Arbeitstrommel 2 wird vom Motor 20 über ein Planetengetriebe angetrieben, das aus Satelliten 5, 7, 8, Blockrädern 13, Sonnenrädern 6, 9 und Trägern 14, 15 besteht. Die Hauptantriebswelle 4 wird bei ausgeschaltetem Motor gestoppt durch Scheiben 10 unter der Wirkung der Feder 11.
Um den Hubmechanismus mit einer Geschwindigkeit von 6,5–6,9 m/s anzutreiben, wird ein Asynchronmotor mit erhöhtem Schlupf vom Typ AOS-32-4M verwendet (Leistung 1,4 kW bei 1320 U/min und Einschaltdauer = 25 %).Die Aufwärtsbewegung des Hakens wird durch einen Endschalter begrenzt.
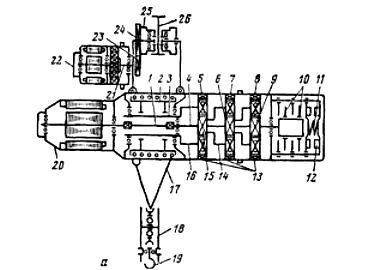
Reis. 2. Elektrischer Antrieb des elektrischen Hebezeugs TEP -1: 1 – Arbeitstrommel, 3 – Hohlwelle, 4 – Arbeitswelle, 5, 7, 8 – Satelliten, 6, 9, 15 – Sonnenräder, 10 – Bremsscheiben, 11 – Bremsfeder, 12 – Elektromagnete, 13 – Blockgetriebe, 14, 16, 21 – Träger, 17 – Kabel, 18 – Aufhängung, 19 – Haken, 20 – Elektromotor zum Heben der Last, 22 – Trolley-Elektromotor, 23, 24 — Zahnräder, 25 — Rollen, 26 — Einschienenbahn.
Abbildung 3 zeigt die Funktionsweise des Hebezeugs. Der Wirkungsgrad des elektrischen Hebezeugs steigt auf 0,58, wenn die Masse der angehobenen Last auf 1000 kg ansteigt.
Interessante Funktionsweise von Motor 4 beim Absenken der Last: Während das Gewicht der Last weniger als 425 kg beträgt, arbeitet der Elektromotor im Motormodus, und wenn die Masse über 425 kg liegt, im Generatormodus. Um das Leerlaufmoment des Hubmechanismus zu überwinden, reicht daher eine Last von 425 kg aus.
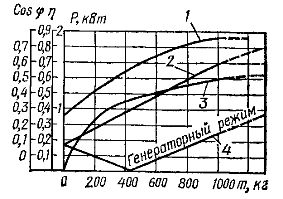
Reis. 3. Betriebseigenschaften eines elektrischen Hebezeugs: 1 – ssphi des Elektromotors, 2 – die Leistung des Elektromotors beim Heben der Last, 3 – Effizienz, 4 – die Leistung des Elektromotors beim Absenken der Last.
Zum Antrieb des Fahrwerks des Elektrohebezeugs dient ein asynchroner Elektromotor 22 (Abb. 2) vom Typ TEM-0,25 (Leistung 0,25 kW bei 1410 U/min und Einschaltdauer = 25 %) mit eingebautem einstufigen Planetengetriebe und Getriebe 23, 24, die die Drehung der Rollen 25 übertragen. An den Bewegungsmechanismen der einfachsten Hebezeuge sind keine Bremsvorrichtungen angebracht. Die Bewegung des Hebezeugs entlang des Balkens in beide Richtungen wird durch mechanische Anschläge begrenzt.
 Ein Schwenkkran unterscheidet sich von einem Hebezeug dadurch, dass sich der Träger, auf dem sich das Hebezeug bewegt, im Produktionsraum bewegen kann, angetrieben von einem Käfigläufer- oder Phasenrotor-Elektromotor. Die Kranträgerbrücke mit elektrischem Antrieb besteht aus einem einzigen Träger, auf dem sich das elektrische Fahrwerk bewegt.
Ein Schwenkkran unterscheidet sich von einem Hebezeug dadurch, dass sich der Träger, auf dem sich das Hebezeug bewegt, im Produktionsraum bewegen kann, angetrieben von einem Käfigläufer- oder Phasenrotor-Elektromotor. Die Kranträgerbrücke mit elektrischem Antrieb besteht aus einem einzigen Träger, auf dem sich das elektrische Fahrwerk bewegt.
Dreiphasen-Asynchronmotoren mit Kurzschlussläufer werden zum Antrieb von Elektroautos mit Außenbordmotor und nur bei hoher Belastbarkeit und der Notwendigkeit einer Drehzahlregelung und sanften „Landung“ von Lasten eingesetzt – Asynchronmotoren mit Phasenrotor.
Aufgrund des Fehlens einer niedrigen Geschwindigkeit, die für eine sanfte Landung von Lasten oder ein genaues Anhalten des Krans erforderlich ist, muss der Arbeiter die Elektromotoren regelmäßig ein- und ausschalten, was die Anzahl der Starts erhöht, eine Erwärmung der Wicklungen verursacht und auch die reduziert Verschleißfestigkeit der Kontakte. Daher verfügen einige Krane über elektrische Antriebe zum Heben und Fahren mit zwei Betriebsgeschwindigkeiten: Nenngeschwindigkeit und reduzierter Geschwindigkeit, die durch den Einsatz von Asynchronmotoren mit zwei Geschwindigkeiten anstelle von Eingeschwindigkeitsmotoren oder einem zusätzlichen Mikroantrieb bereitgestellt werden.
 Niedriggeschwindigkeitsbetriebene (0,2 – 0,5 m/s) hängende elektrische Laufkatzen, die von Käfigläufermotoren angetrieben werden, werden normalerweise vom Boden (Boden) aus mit hängenden Elektrofahrwerken gesteuert Druckknopfstationen… Bei Luftwagen und Kränen mit Kabine für den Bediener (bei einer Geschwindigkeit von 0,8 – 1,5 m/s) werden die Motoren mit Phasenrotor durch Steuerungen gesteuert.
Niedriggeschwindigkeitsbetriebene (0,2 – 0,5 m/s) hängende elektrische Laufkatzen, die von Käfigläufermotoren angetrieben werden, werden normalerweise vom Boden (Boden) aus mit hängenden Elektrofahrwerken gesteuert Druckknopfstationen… Bei Luftwagen und Kränen mit Kabine für den Bediener (bei einer Geschwindigkeit von 0,8 – 1,5 m/s) werden die Motoren mit Phasenrotor durch Steuerungen gesteuert.
Die Elektromotoren der Hebezeuge und Brückenkräne werden von gesteuert Reversible Magnetstarter und Startknöpfe, die an einem flexiblen, gepanzerten Kabel aufgehängt sind.Die Spannung an die Spulen und Kontakte der Schütze zum Anheben von KM1 (Abb. 4), zum Absenken von KM2, zum Vorwärts- und Rückwärtsbewegen von KMZ von KM4 wird über einen Leistungsschalter und ein Kabel oder Fahrdrähte zugeführt. Die Aufwärtsbewegung des Hebegerätes wird durch einen Endschalter begrenzt. Quadrat.
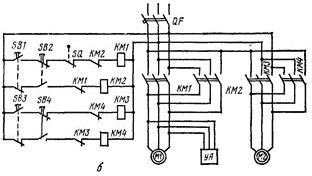
Reis. 4. Elektrisches Schaltbild des Kranträgers
Die Sperrung der Umkehrschütze von Motoren gegen gleichzeitiges Einschalten erfolgt mittels Doppelkreistaster und mechanischer Sperrung der Schütze selbst (oder Öffnung der Hilfskontakte der Schütze).
Bei elektrischen Hebezeugen und Brückenkränen werden die Starttasten nicht durch die entsprechenden Verriegelungskontakte des Schließschützes umgangen, wodurch verhindert wird, dass das Hebezeug weiterbetrieben wird, nachdem der Bediener die Drucktastenbedieneinheit losgelassen hat. Gleichzeitig mit dem Hubmotor wird der UA-Magnet betätigt, der die Bremse öffnet.
Die maximal zulässige Startzeit für Hubmechanismen beträgt 3 – 5 s, für Bewegungsmechanismen – 10 – 15 s.
Sie können auch sehen: Elektrische Ausrüstung und Ketten von elektrischen Hebezeugen
Die Funktionsweise der Motoren von Elektrostaplern, Elektrohebezeugen und Brückenkränen hängt von ihrem Einsatzzweck ab. Wenn die Güter auf Brückenkränen über kurze Distanzen bewegt werden, arbeiten die Motoren im beschämenden Kurzzeitmodus (z. B. in Trolleys, die Teile von Werkstätten oder Lagerhallen bedienen).

Bei Laufkranen, die Waren über relativ große Entfernungen über das Werksgelände transportieren, sind die Betriebsarten der Hub- und Bewegungsmotoren unterschiedlich: Die erste zeichnet sich durch einen Kurzzeitmodus aus, die zweite durch einen Langzeitmodus. Die Leistung Die Bestimmung der Motoren für das Heben und Bewegen von elektrischen Hebezeugen, Hebezeugen und Portalkränen erfolgt auf die gleiche Weise wie für Motoren von Laufkranmechanismen.