Was ist ein linearer Differentialtransformator?
Ein in einer Primärspule fließender Wechselstrom kann dazu verwendet werden, in zwei Sekundärspulen eine Wechselspannung zu induzieren. Wenn die beiden Sekundärwicklungen in ihren Eigenschaften identisch sind und auch die beiden Wege der durch diese Spulen verlaufenden magnetischen Feldlinien identisch sind, sind die beiden erzeugten Sekundärspannungen gleich. Ein Gerät mit dieser Struktur wird Differenztransformator genannt.

Ein Differentialtransformator kann einen Luftkern oder einen Magnetkern haben.
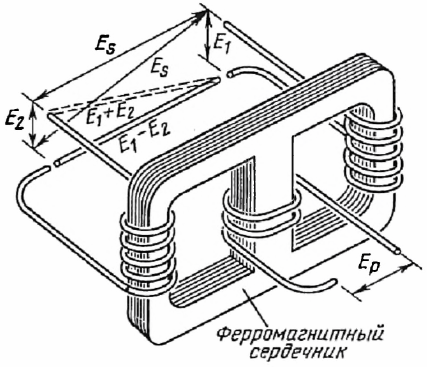
Zwei Sekundärwicklungen können entweder gleichphasig oder gegenphasig angeschlossen werden, im ersten Fall werden ihre Spannungen addiert und im zweiten Fall voneinander subtrahiert.
Eine Primärwicklung dient zur Ansteuerung zweier symmetrischer Sekundärwicklungen, die so geschaltet werden können, dass sich die Sekundärspannungen addieren oder voneinander subtrahieren.
Wenn zwei Spulen nach einem Subtraktionsschema verbunden sind, beträgt die gesamte Sekundärspannung bei gleichen Spannungswerten Null.Wenn die Magnetkreiseigenschaften einer dieser Spulen im Vergleich zu den Magnetkreiseigenschaften der anderen Spule absichtlich verändert werden, unterscheiden sich die beiden Sekundärspannungen und ihre Differenz wird nicht Null sein.
Unter diesen Bedingungen gibt die Phase der gesamten Sekundärspannung an, welcher Pfad der magnetischen Feldlinien den größten Widerstand aufweist, während die Amplitude dieser Spannung den Wert der Reluktanzdifferenz widerspiegelt.
Wenn die gleiche Aktion verwendet wird, um den magnetischen Widerstand eines Pfads zu erhöhen und den magnetischen Widerstand des anderen Pfads zu verringern, erreicht die Ausgangsspannung, die diese Aktion widerspiegelt, ihren Maximalwert und die Übertragungsfunktion weist die größtmögliche Linearität auf.
Da keine zwei Sekundärwicklungen und keine zwei Pfade magnetischer Feldlinien exakt gleich gemacht werden können, hat ein Differentialtransformator immer eine eindeutige Ausgangsspannung, auch wenn am Eingang kein Nutzsignal anliegt.
Darüber hinaus sind die Eigenschaften magnetischer Kreise nichtlinear. Durch diese Nichtlinearität treten auch harmonische Anteile der Grundfrequenz der angelegten primären Erregerspannung auf, die in keiner Anordnung der Sekundärwicklungen vollständig kompensiert werden können.
Der magnetische Widerstand eines ferromagnetischen Luftspaltkreises ist eine Funktion der Spaltbreite mit starker Nichtlinearität. Infolgedessen ist die Induktivität einer um einen solchen Stromkreis gewickelten Spule auch eine nichtlineare Funktion der Spaltbreite.
Wenn gleichzeitig zwei mehr oder weniger identische Wege der magnetischen Feldlinien mit jeweils einem Luftspalt vorhanden sind und die Breite des einen Spaltes zunimmt, während die Breite des anderen abnimmt, dann ist der Unterschied im magnetischen Widerstand dieser beiden Pfade können hinreichend linear variieren.
Die Grundprinzipien des Differentialtransformators werden in einer Vielzahl spezifischer Konstruktionskonfigurationen für viele verschiedene Zwecke in die Praxis umgesetzt.
Linearer variabler Differentialtransformator (LVDT) ist ein passiver Wandler (Sensor), der nach dem Prinzip der Gegeninduktion arbeitet und zur Messung von Weg, Dehnung, Druck und Gewicht eingesetzt werden kann.
In den meisten Fällen können sie mithilfe von NS Verschiebungen im Bereich von mehreren Millimetern bis Zentimetern messen und diese direkt in ein elektrisches Signal umwandeln.
Die Induktivität der Spule, in deren Nähe oder innerhalb derer sich der ferromagnetische Stab befindet, ist eine Funktion der Koordinate der Position dieses Stabes relativ zur Spule mit starker Nichtlinearität.
Handelt es sich bei einem solchen Stab um einen ferromagnetischen Kreis eines Differentialtransformators, dann kann die sekundäre Differenzspannung als Indikator für die Verschiebung des Stabes dienen, die linear genug von dieser Verschiebung abhängt.
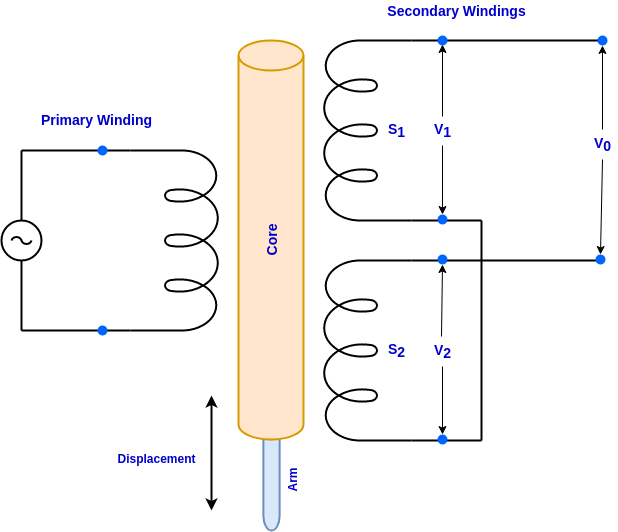
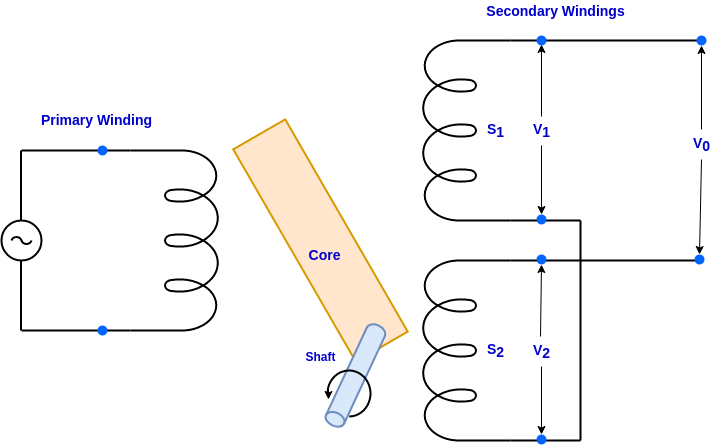
Die Primärwicklung ist an eine Wechselstromquelle angeschlossen. Die beiden Sekundärwicklungen S1 und S2 haben die gleiche Windungszahl und sind einander gegenüber in Reihe geschaltet.
Somit ist die in diesen Wicklungen induzierte EMF zueinander um 180° phasenverschoben und somit hebt sich der Gesamteffekt auf.

Aus der Phase und Amplitude der Sekundärspannung kann die Lage des im Aufbau des Differentialtransformators vorgesehenen symmetrischen ferromagnetischen Kerns bestimmt werden.
Die absolute Differenz zwischen den beiden Sekundärspannungen gibt den Absolutwert der Verschiebung des Stabes relativ zur Mittel- oder Nullposition an, und die Phase dieser unterschiedlichen Spannung gibt die Richtung der Verschiebung an.
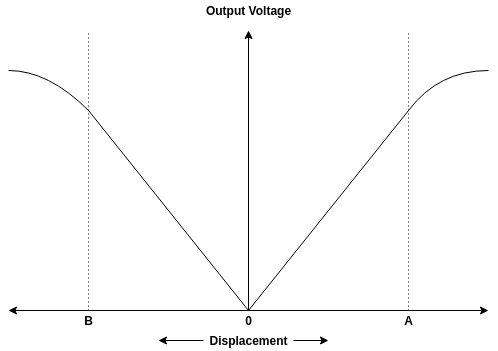
Die B/I-Kurve eines linear variablen Differentialtransformators ist in der Abbildung dargestellt.
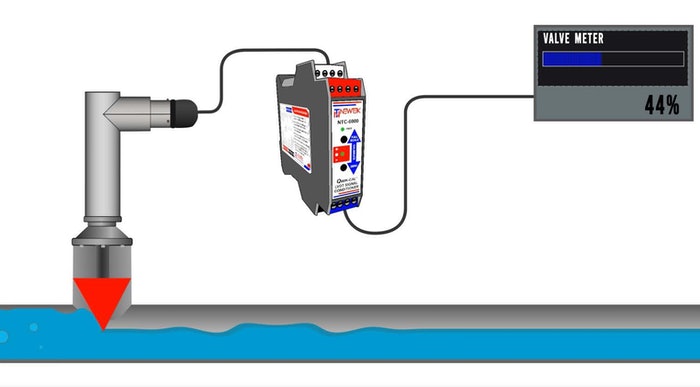
Ein Beispiel für die Verwendung eines linearen Differentialtransformators zur Bereitstellung einer genauen Positionsrückmeldung für die Ventilüberwachung und -steuerung in Chemieanlagen, Kraftwerken und landwirtschaftlichen Geräten:
Tauch-Wegsensoren LVDT D5W:
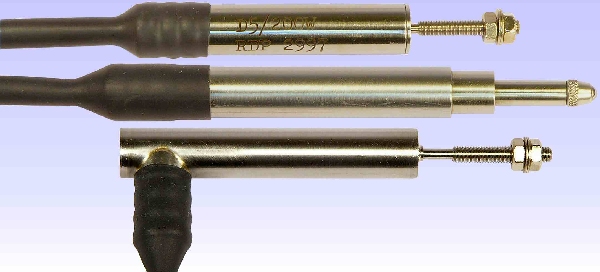
Diese Aufnehmer dienen zur Messung von Verschiebung und Position. Sie ermöglichen eine genaue Messung der Position des Ankers (gleitendes Teil) relativ zum Wegsensorgehäuse.
Tauchfähige Wegaufnehmer sind für die Messung im eingetauchten Zustand in geeigneten Flüssigkeiten konzipiert. Nichtmagnetische Flüssigkeiten können das Ankerrohr überschwemmen, ohne den Betrieb des Wandlers zu beeinträchtigen. Diese Wandler sind in ungeregelter oder Federrücklaufausführung erhältlich.
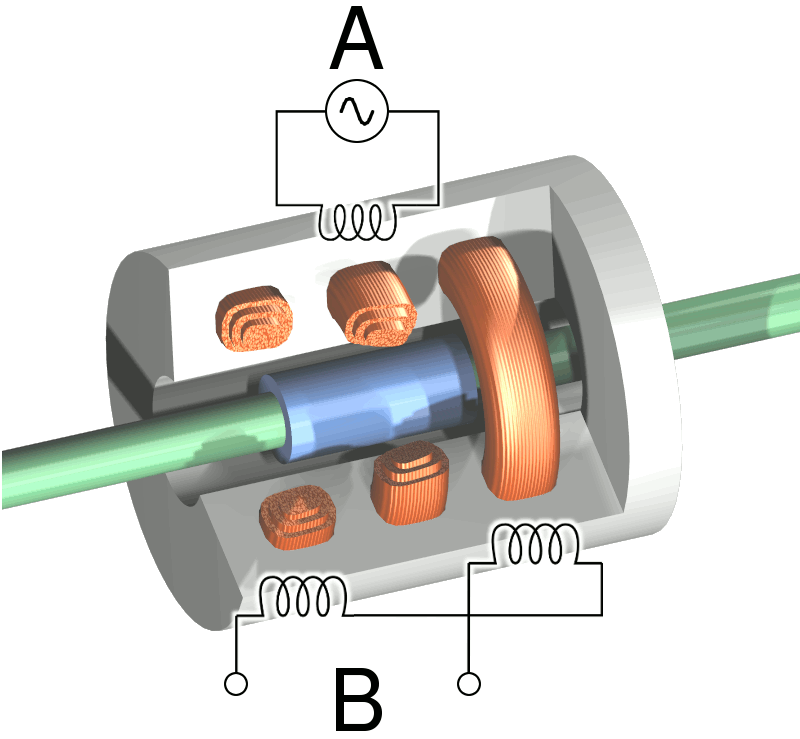
Bei der Automatisierung verschiedener technologischer Prozesse werden häufig bilaterale Wandler mit einem Differentialtransformator mit ferromagnetischem Kern verwendet, der an seinen Enden in gleichen Abständen in die beiden Sekundärspulen eingesetzt wird.
Wenn sich der Stab axial bewegt, dringt er tiefer in eine dieser Windungen ein und ragt aus der anderen heraus.Die absolute Differenz zwischen den beiden Sekundärspannungen gibt den Absolutwert der Verschiebung des Stabes relativ zur Mittel- oder Nullposition an, und die Phase dieser unterschiedlichen Spannung gibt die Richtung der Verschiebung an.
Rotierender AC-Differenztransformator:
Ein rotierender Differenzialtransformator ist ein passiver Transformator, der auf dem Prinzip der Gegeninduktion basiert. Es wird zur Messung der Winkelverschiebung verwendet.
Sein Aufbau ähnelt bis auf die Kernkonstruktion dem eines linear variablen Differentialtransformators.
Die Primärwicklung ist an eine Wechselstromquelle angeschlossen. Die beiden Sekundärwicklungen S1 und S2 haben die gleiche Windungszahl und sind einander gegenüber in Reihe geschaltet.
Vorteile des linearen Differentialtransformators:
-
Es besteht kein physischer Kontakt zwischen dem Kern und den Spulen;
- Hohe Zuverlässigkeit;
-
Schnelle Antwort;
-
Lange Lebensdauer.
Aufgrund seiner hohen Genauigkeit ist er der am weitesten verbreitete induktive Sensor.