Arten von Asynchronmotoren, Sorten, welche Motoren gibt es?
Wechselstrommotoren, die für ihren Betrieb das rotierende Magnetfeld des Stators nutzen, sind heute weit verbreitete elektrische Maschinen. Diejenigen von ihnen, bei denen sich die Drehzahl des Rotors von der Rotationsfrequenz des Magnetfelds des Stators unterscheidet, werden als Asynchronmotoren bezeichnet.

Aufgrund der großen Kapazität der Energiesysteme und der großen Länge der Stromnetze erfolgt die Energieversorgung der Verbraucher stets mit Wechselstrom. Daher ist es selbstverständlich, eine maximale Nutzung von Wechselstrom-Elektromotoren anzustreben. Dies scheint Sie von der Notwendigkeit mehrerer Energieumwandlungen zu befreien.
Leider sind Wechselstrommotoren hinsichtlich ihrer Eigenschaften und insbesondere der Regelbarkeit den Gleichstrommotoren deutlich unterlegen, weshalb sie hauptsächlich in Anlagen eingesetzt werden, in denen keine Drehzahlregelung erforderlich ist.
Vor relativ kurzer Zeit gesteuerte Wechselstromsysteme mit durchgeschalteten Wechselstrommotoren Frequenzumrichter.
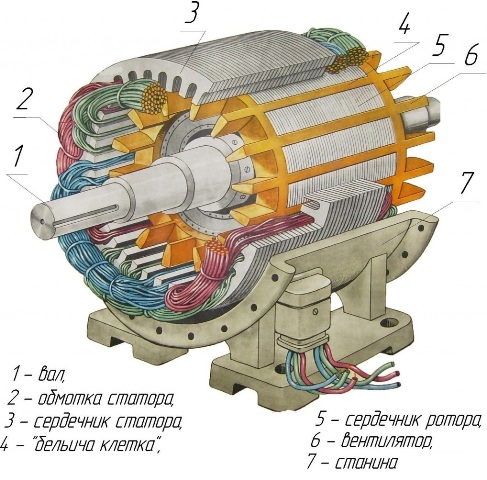
Ein Käfigläufer-Induktionsmotor ist ein rotierender Transformator, dessen Primärwicklung der Stator und dessen Sekundärwicklung der Rotor ist. Zwischen Stator und Rotor besteht ein Luftspalt. Wie bei jedem echten Transformator hat auch jede Spule ihren eigenen Widerstand.
Beim Anschluss des Motors an das Netz entsteht im Stator ein Magnetfeld, das sich synchron mit der Frequenz des Netzes dreht. Aufgrund des Phänomens der elektromagnetischen Induktion unter der Wirkung des Statormagnetfelds in den elektrisch geschlossenen Rotorwicklungen, Elektrizität.
Der induzierte elektrische Strom im Rotor erzeugt ein eigenes Magnetfeld, das mit dem rotierenden Magnetfeld des Stators interagiert. Dadurch beginnt sich der Rotor zu drehen und an der Motorwelle entsteht ein dem Statorstrom proportionales mechanisches Moment.
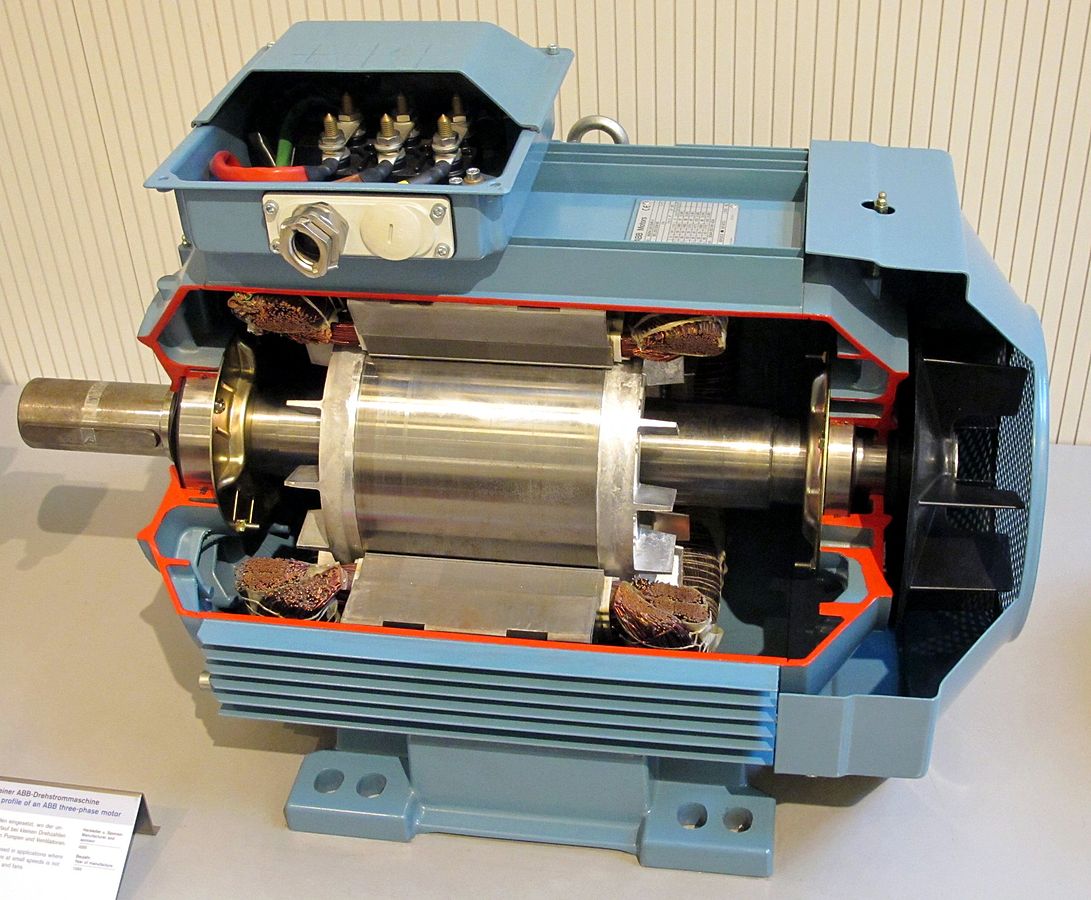
Schnittmodell eines Drehstrom-Induktionsmotors
Ein charakteristisches Merkmal eines Asynchronmotors ist, dass aufgrund des Zusammenspiels der Felder von Stator und Rotor die Drehzahl der Motorwelle etwas geringer ist als die Frequenz des Versorgungsnetzes. Man nennt die Differenz zwischen der Netzfrequenz und der Drehzahl rutschen.
Asynchronmotoren werden aufgrund ihrer einfachen Herstellung und hohen Zuverlässigkeit in verschiedenen Wirtschafts- und Produktionsbereichen häufig eingesetzt. Mittlerweile gibt es vier Haupttypen von Induktionsmotoren:
-
einphasiger asynchroner Käfigläufermotor;
-
Zweiphasen-Käfigläufer-Induktionsmotor;
-
Dreiphasen-Käfigläufer-Asynchronmotor;
-
Dreiphasen-Asynchronmotor mit gewickeltem Rotor.

Ein einphasiger Induktionsmotor enthält nur eine funktionierende Statorwicklung, die bei laufendem Motor mit Wechselstrom versorgt wird.Um den Motor jedoch zu starten, befindet sich an seinem Stator eine zusätzliche Wicklung, die über einen Kondensator oder eine Induktivität kurzzeitig mit dem Netzwerk verbunden oder kurzgeschlossen wird. Dies ist notwendig, um eine anfängliche Phasenverschiebung zu erzeugen, damit der Rotor anfängt, sich zu drehen, andernfalls würde das pulsierende Statormagnetfeld den Rotor nicht an seinen Platz drücken.
Der Rotor eines solchen Motors ist wie bei jedem Eichhörnchenläufer-Induktionsmotor ein zylindrischer Kern mit geformten Aluminiumkanälen und mitgeformten Lüftungsrippen. Ein solcher Käfigläufer wird Kurzschlussläufer genannt. Einphasenmotoren werden in Anwendungen mit geringer Leistung wie Raumventilatoren oder kleinen Pumpen eingesetzt.

Zweiphasen-Induktionsmotoren sind am effizientesten, wenn sie in einem einphasigen Wechselstromnetz betrieben werden. Sie enthalten zwei senkrecht angeordnete Arbeitsstatorwicklungen, und eine der Wicklungen ist direkt mit dem Wechselstromnetz verbunden, die zweite über einen Phasenschieberkondensator, so dass ein rotierendes Magnetfeld entsteht und ohne Kondensator der Rotor selbst nicht bewegen.
Diese Motoren haben auch einen Käfigläufer und ihre Anwendung ist viel breiter als die von Einphasenmotoren. Mittlerweile gibt es Waschmaschinen und diverse Maschinen. Zweiphasenmotoren zur Speisung aus einphasigen Netzen werden Kondensatormotoren genannt, da der Phasenschieberkondensator häufig ein integraler Bestandteil dieser Motoren ist.

Ein Drehstrom-Induktionsmotor enthält drei gegeneinander versetzte Statorwicklungen, sodass deren Magnetfelder beim Anschluss an ein Drehstromnetz um 120 Grad räumlich gegeneinander verschoben sind.Wenn ein Drehstrommotor an ein Drehstromnetz angeschlossen wird, entsteht ein rotierendes Magnetfeld, das den Käfigläufer antreibt.
Die Statorwicklungen eines Drehstrommotors können in Stern- oder Dreieckschaltung angeschlossen werden. Für die Versorgung des Motors in Sternschaltung ist eine höhere Spannung erforderlich als in Dreieckschaltung. Daher sind am Motor zwei Spannungen angegeben, zum Beispiel: 127 / 220 oder 220/380. Drehstrommotoren sind für den Antrieb verschiedener Metallbearbeitungsmaschinen, Winden, Kreissägen, Kräne usw. unverzichtbar.

Ein dreiphasiger Asynchronmotor mit Phasenrotor hat einen Stator, der den oben beschriebenen Motortypen ähnelt, einen laminierten Magnetkreis mit drei in seinen Kanälen angeordneten Wicklungen, aber die Aluminiumstäbe sind nicht in den Phasenrotor eingegossen, und das komplette - Die Phasendrehstromwicklung ist bereits verlegt Sternverbindung… Die Sternenden der Phasenrotorwicklung werden zu drei Schleifringen geführt, die auf der Rotorwelle montiert und von dieser elektrisch isoliert sind.
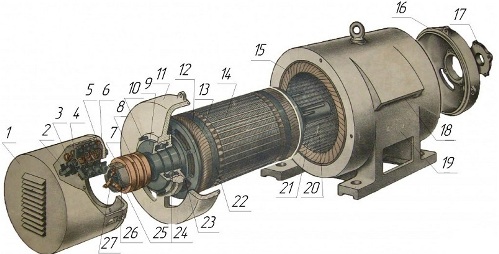
1 – Gehäuse mit Gittern, 2 – Bürsten, 3 – Bürstenhub mit Bürstenhaltern, 4 – Bürstenbefestigungsstift, 5 – Kabelbürsten, 6 – Block, 7 – Isolierhülse, 8 – Schleifringe, 9 – äußere Lagerabdeckung, 10 — Bolzen zur Befestigung des Kastens und der Lagerdeckel, 11 — hinterer Lagerschild, 12 — Rotorspule, 13 — Spulenhalter, 14 — Rotorkern, 15 — Rotorspule, 16 — Schild am vorderen Ende, 7 — äußerer Lagerdeckel, 18 – Lüftungsschlitze, 19 – Rahmen, 20 – Statorkern, 21 – Stehbolzen der inneren Lagerabdeckung, 22 – Bandage, 23 – innere Lagerabdeckung, 21 – Lager, 25 – Welle, 26 – Gleitringe, 27 – Rotorwicklungen
Den Ringen wird über Bürsten eine dreiphasige Wechselspannung zugeführt, der Anschluss kann sowohl direkt als auch über Rheostate erfolgen. Natürlich sind Motoren mit Rotationsmotoren teurer, aber ihre Anlaufdrehmoment unter Last ist deutlich höher als bei Käfigläufermotoren. Aufgrund der erhöhten Leistung und des hohen Anlaufdrehmoments hat dieser Motortyp Anwendung in Aufzugs- und Kranantrieben gefunden, also dort, wo das Gerät unter Last und nicht im Leerlauf gestartet wird.
Lesen Sie hier mehr über diesen Motortyp: Asynchrone Elektromotoren mit gewickeltem Rotor
Siehe auch: Wie sich Induktionsmotoren von Synchronmotoren unterscheiden