Geräte zur Steuerung der Motordrehzahl
Asynchrone Elektromotoren werden häufig in Gegenstrombremskreisen eingesetzt. Induktionsgeschwindigkeitsregelrelais... Die Eingangswelle des Relais 5, auf der ein zylindrischer Permanentmagnet 4 montiert ist, ist mit der Welle des Elektromotors verbunden, dessen Winkelgeschwindigkeit gesteuert werden soll.
Wenn sich der Elektromotor dreht, kreuzt das Magnetfeld die Drähte des Kurzschlusses 3 des Drehstators 6. In der Wicklung wird eine EMK induziert, deren Wert proportional zur Winkelgeschwindigkeit der Welle ist. Unter seinem Einfluss entsteht in der Spule ein Strom und es entsteht eine Wechselwirkungskraft, die dazu neigt, den Stator 6 in Drehrichtung des Magneten zu drehen.
Ab einer bestimmten Drehzahl steigt die Kraft so stark an, dass der Begrenzer 2 unter Überwindung des Widerstands der Blattfeder die Relaiskontakte schaltet. Das Relais ist mit zwei Kontaktknoten ausgestattet: 1 und 7, die je nach Drehrichtung geschaltet werden.
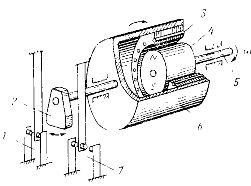
Abbildung 1. Induktives Geschwindigkeitsregelrelais
Ein Induktions-Geschwindigkeitsregelrelais hat ein ziemlich komplexes Design und eine geringe Genauigkeit, die nur für grobe Regelsysteme akzeptabel ist. Eine höhere Genauigkeit der Drehzahlregelung kann durch den Einsatz eines Tachogenerators erreicht werden – einer messenden Mikromaschine, deren Spannung an den Anschlüssen direkt proportional zur Drehzahl ist.
Tachogeneratoren werden in Rückkopplungssystemen mit variabler Drehzahl und einem weiten Drehzahlbereich eingesetzt und weisen daher einen Fehler von nur wenigen Prozent auf. Am gebräuchlichsten sind Gleichstrom-Tachogeneratoren.
In Abb. In Abb. 2 zeigt ein Diagramm eines Drehzahlregelrelais für einen Elektromotor M unter Verwendung eines Tachogenerators G, dessen Ankerkreis ein elektromagnetisches Relais K und einen Regelwiderstand R umfasst. Wenn die Spannung an den Ankerklemmen des Tachogenerators die Betriebsspannung überschreitet, Das Relais wird im externen Stromkreis eingeschaltet.
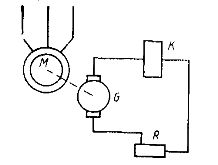
Abbildung 2. Geschwindigkeitsregelrelais mit Tachogenerator
 Abbildung 3. Schema einer Tachometerbrücke
Abbildung 3. Schema einer Tachometerbrücke
Mit zunehmendem Widerstand des Ankerkreises erhöht sich die Genauigkeit der Schaltung. Daher ist das Relais manchmal über einen zwischengeschalteten Halbleiterverstärker mit dem Tachogenerator verbunden. Zu diesem Zweck können auch berührungslose Halbleiter-Schwellenelemente mit stabiler Ansprechspannung verwendet werden.
Die Zuverlässigkeit der Schaltung kann verbessert werden, wenn der Gleichstrom-Tachogenerator durch einen kontaktlosen asynchronen Tachogenerator ersetzt wird.
Ein asynchroner Tachogenerator verfügt über einen hohlen, nichtmagnetischen Rotor aus Glas. Der Stator hat zwei Wicklungen im Winkel von 90° zueinander. Eine der Spulen ist an ein Wechselstromnetz angeschlossen.Der anderen Wicklung wird eine sinusförmige Spannung entnommen, die proportional zur Drehzahl des Rotors ist. Die Frequenz der Ausgangsspannung ist immer gleich der Frequenz des Netzes.
 Bei modernen DC-Executive-Motoren ist der Tachogenerator im gleichen Gehäuse wie die Maschine eingebaut und auf der gleichen Welle wie der Hauptmotor montiert. Dies reduziert die Welligkeit der Ausgangsspannung und verbessert die Genauigkeit der Geschwindigkeitsregelung.
Bei modernen DC-Executive-Motoren ist der Tachogenerator im gleichen Gehäuse wie die Maschine eingebaut und auf der gleichen Welle wie der Hauptmotor montiert. Dies reduziert die Welligkeit der Ausgangsspannung und verbessert die Genauigkeit der Geschwindigkeitsregelung.
Gleichstrom-Tachogeneratoren vom Typ PT-1 mit elektromagnetischer Erregung werden üblicherweise in Elektromotoren der PBST-Serie verwendet. Hohes Drehmoment Gleichstrommotoren Ich habe einen eingebauten Permanentmagnet-erregten Tacho.
In Fällen, in denen der Gleichstrommotor M keinen Tachogenerator hat, kann seine Drehzahl durch Messung der Anker-EMK gesteuert werden. Hierzu wird eine tachometrische Brückenschaltung verwendet, die aus zwei Widerständen besteht: R1 und R2, Anker Ri und zusätzlichen Polen der Maschine Rdp. Ausgangsspannung der Tachometerbrücke Uout = U1 — Udp, oder
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
Die letzte Gleichung gilt unter der Voraussetzung, dass der magnetische Fluss des Elektromotors konstant ist. Durch Einbeziehung eines Schwellwertelements am Ausgang der Tachometerbrücke erhält man ein Relais, das auf eine bestimmte Drehwinkelgeschwindigkeit eingestellt wird. Die Genauigkeit der Tachometerbrücke ist aufgrund der Variabilität des Bürstenkontaktwiderstands und des Erwärmungsungleichgewichts des Widerstands gering.
Wenn der Gleichstrommotor mit einer künstlichen Kennlinie arbeitet und ein großer zusätzlicher Widerstand im Anker enthalten ist, kann die Geschwindigkeitsrelaisfunktion durch ein an die Ankerklemmen angeschlossenes Spannungsrelais übernommen werden.
Spannung im Anker des Elektromotors Uja = E + IjaRja.
Da I = (U — E) / (Ri + Rext) ist, erhalten wir Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, dann kann der zweite Term vernachlässigt werden und die Ankerklemmenspannung kann als direkt proportional zur EMK und der Drehzahl des Motors betrachtet werden.
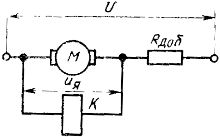
Abbildung 4. Geschwindigkeitsregelung mit Spannungsrelais
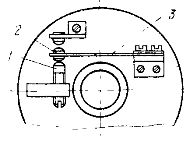 Abbildung 5. Relais zur Steuerung der Zentrifugalgeschwindigkeit
Abbildung 5. Relais zur Steuerung der Zentrifugalgeschwindigkeit
Sie haben ein sehr einfaches Design. Zentrifugalgeschwindigkeitsschalter... Die Basis des Relais ist eine auf einer Welle montierte Kunststoff-Frontplatte 4, deren Drehzahl gesteuert werden muss. Auf der Frontplatte sind eine Flachfeder 3 mit einem massiven beweglichen Kontakt 2 und ein fester einstellbarer Kontakt 1 befestigt. Die Feder besteht aus Spezialstahl, dessen Elastizitätsmodul praktisch unabhängig von Temperaturänderungen ist.
Beim Drehen der Frontplatte wirkt auf den beweglichen Kontakt eine Zentrifugalkraft, die bei einer bestimmten Drehgeschwindigkeit den Widerstand der Flachfeder überwindet und die Kontakte schaltet. Die Stromzufuhr zur Kontaktvorrichtung erfolgt über Schleifringe und Bürsten, die in der Abbildung nicht dargestellt sind. Solche Relais werden in Drehzahlstabilisierungssystemen für Gleichstrom-Mikromotoren eingesetzt. Trotz seiner Einfachheit hält das System die Geschwindigkeit mit einem Fehler in der Größenordnung von 2 % aufrecht.
