Antriebsketten für Förderbänder
 Der Artikel untersucht die elektrischen Antriebssysteme einiger Förderer. In Abb. In Abb. 1 zeigt schematisch den elektrischen Antrieb einzelner Förderstrecken, deren Geschwindigkeiten unbedingt gleich sein müssen. Ein solcher Bedarf entsteht in der kontinuierlichen Produktion, wenn verschiedene Produkte nach den notwendigen technologischen Vorgängen auf separaten Linien am Montageort in strikter Übereinstimmung zueinander zusammentreffen müssen.
Der Artikel untersucht die elektrischen Antriebssysteme einiger Förderer. In Abb. In Abb. 1 zeigt schematisch den elektrischen Antrieb einzelner Förderstrecken, deren Geschwindigkeiten unbedingt gleich sein müssen. Ein solcher Bedarf entsteht in der kontinuierlichen Produktion, wenn verschiedene Produkte nach den notwendigen technologischen Vorgängen auf separaten Linien am Montageort in strikter Übereinstimmung zueinander zusammentreffen müssen.
Das Schema ermöglicht es Ihnen, mehrere Förderlinien gleichzeitig zu starten und zu stoppen und ihre Geschwindigkeit anzupassen. Eine koordinierte Bewegung wird durch Schalten der Motoren nach dem Synchronwellenschema mit einem gemeinsamen Wechselrichter-Frequenzumrichter erreicht. Die Drehzahlregelung der Motoren D1 und D2 erfolgt durch Änderung der Drehzahl des Wechselrichters mithilfe eines Getriebes P mit variablem Übersetzungsverhältnis.
Die Genehmigung zum Starten von Förderbändern wird von Bedienern erteilt, die den Betrieb der Förderbänder in den kritischsten Bereichen überwachen. Beim Drücken der Bereitschaftstasten G1 und G2 leuchten die Signallampen LS1 und LS2 auf und die Relais RG1 und RG2 werden aktiviert. Letztere bereiten das Relais für den Start des RP vor.
Wenn Sie die Starttaste drücken, wird der RP ausgelöst, der das Schütz L1 einschaltet. Es erfolgt eine einphasige Synchronisierung der Wechselrichterposition D1 und D2. Nach Zeitverzögerungen schalten in den Schützen L1 und L2 eingebaute Pendelrelais abwechselnd L2 ein, L1 aus und LZ ein. Der Start des Rheostats des Frequenzumrichtermotors erfolgt nach dem Zeitprinzip (Zeitrelais RU1, RU2, RUZ).
In Abb. In Abb. 2 zeigt ein Diagramm des elektrischen Antriebs der U-Bahn-Rolltreppe, mit dem Sie am Heben und Senken der Fahrgäste arbeiten können. Als Antriebsmotor kommt ein Asynchronmotor mit Phasenläufer mit einer Leistung von bis zu 200 kW zum Einsatz. Zu bestimmten Tageszeiten kann die Rolltreppe bei geringem Passagieraufkommen längere Zeit nahezu im Leerlauf arbeiten.
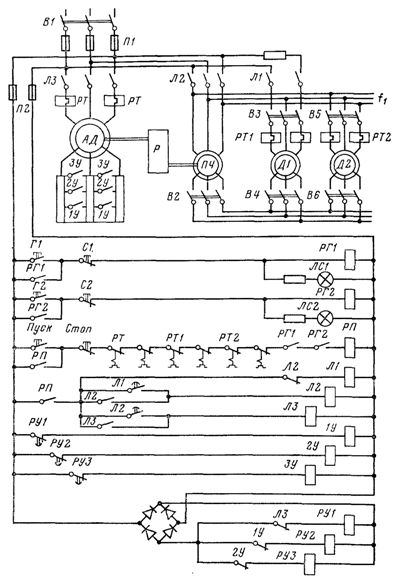
Reis. 1. Schema des elektrischen Antriebs von Förderstrecken mit koordinierter Bewegung.
Um den Leistungsfaktor und die Effizienz des Motors zu erhöhen, wird die Statorwicklung von Dreieck auf Stern umgeschaltet, wenn die Wellenlast auf etwa 40 % des Nennwerts reduziert wird. Mit zunehmender Belastung dreht es sich wieder in das Dreieck.
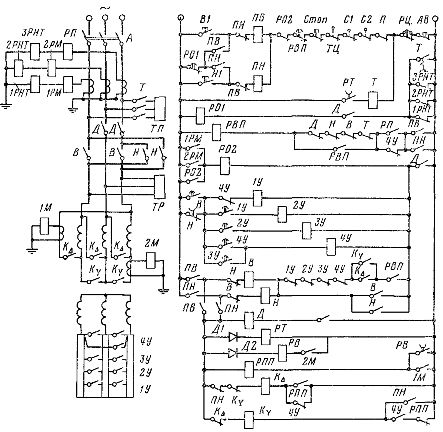
Reis. 2. Schema des elektrischen Antriebs der U-Bahn-Rolltreppe.
Diese Umschaltung erfolgt automatisch durch die Überstromrelais 1M und 2M, die über die Relais RPP und РВ die Schütze k∆ und kY steuern. Der RV-Kontakt mit Öffnungsverzögerung gewährleistet das Vorhandensein des RPP-Spulenkreises im Zeitraum zwischen 2M aus und 1M ein.
Im Generator-Abstiegsmodus mit Volllast wird der Motor (aufgrund mechanischer Verluste der Anlage) deutlich weniger belastet als bei ähnlicher Belastung im Steigmodus.Daher ist die Statorwicklung des Motors im Droop-Modus immer in Sternschaltung geschaltet. Der Motorstart erfolgt zeitabhängig über Pendelrelais an den Beschleunigerschützen 1U-4U. Der Anschlag ist mechanisch. In diesem Fall wird die Betriebsbremse TP auf der Motorwelle und die Sicherheitsbremse TP auf der Antriebsgetriebewelle installiert, um sicherzustellen, dass die Leiter stoppt, wenn die mechanische Verbindung zwischen Getriebe und Motorwellen unterbrochen wird.
Die Schaltung implementiert die typischen Sicherheitsverriegelungen, die im vorherigen Abschnitt beschrieben wurden: bei einer Fehlfunktion des mechanischen Teils der Ausrüstung – Entfernung von Ketten und Handläufen (Endschalter TC, P), Verletzung der Struktur der Stufen (Endschalter C1 und C2). ), Übertemperatur der Lager (Thermorelais 7), durch Überdrehzahl (Fliehkraftrelais RC).
Darüber hinaus ist ein Motorschutz vorgesehen: maximal (Relais 1RM, 2RM), vor Überlastung (Relais RP), vor Leistungsverlust des Motors (Nullstromrelais 1RNT, 2RNT, 3RNT), vor Verschweißen der Schließkontakte von Leistungsschützen (Öffnen der Kontakte D, Y, B, T im Spulenkreis RVP und 1U-4U im Spulenkreis B).
Der Schutz gegen Stromausfall, Lagerüberhitzung und Motorüberlastung erfolgt mit einer Zeitverzögerung, die durch die Zeitrelais PO1 und RVP bestimmt wird. Alle Schutzvorrichtungen außer dem ferngesteuerten Drehzahlrelais stoppen den Motor, indem sie ihn vom Netz trennen und die TP-Betriebsbremse betätigen. Erst am Ende des Bremsvorgangs, nach Ablauf der Verzögerungszeit des PT-Relais, wird zusätzlich die Sicherheitsbremse TP betätigt.Bei Betätigung des RC-Geschwindigkeitsrelais oder Betätigung des Not-Aus-Tasters werden beide Bremsen gleichzeitig betätigt.