Mechanische Eigenschaften von Elektromotoren und Produktionsmechanismen
 Bei der Auslegung eines Elektroantriebs muss der Elektromotor so ausgewählt werden, dass seine mechanischen Eigenschaften mit den mechanischen Eigenschaften des Produktionsmechanismus übereinstimmen. Die mechanischen Kennwerte geben den Zusammenhang der Variablen im stationären Zustand wieder.
Bei der Auslegung eines Elektroantriebs muss der Elektromotor so ausgewählt werden, dass seine mechanischen Eigenschaften mit den mechanischen Eigenschaften des Produktionsmechanismus übereinstimmen. Die mechanischen Kennwerte geben den Zusammenhang der Variablen im stationären Zustand wieder.
Eine mechanische Eigenschaft des Mechanismus wird als Beziehung zwischen der Winkelgeschwindigkeit und dem Widerstandsmoment des Mechanismus, reduziert auf die Motorwelle, bezeichnet) ω = f (Mc).
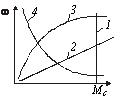
Reis. 1. Mechanische Eigenschaften von Mechanismen
Unter all der Vielfalt gibt es mehrere charakteristische Arten mechanischer Eigenschaften der Mechanismen:
1. Kennlinie mit einem von der Geschwindigkeit unabhängigen Widerstandsmoment (Gerade 1 in Abb. 1). Die geschwindigkeitsunabhängige mechanische Kennlinie wird als Gerade parallel zur Rotationsachse, in diesem Fall vertikal, gezeichnet. Eine solche Eigenschaft besitzen beispielsweise Kräne, Winden, Kolbenpumpen mit konstanter Förderhöhe usw.
2.Eine Kennlinie mit einem linear von der Geschwindigkeit abhängigen Widerstandsmoment (Zeile 2 in Abb. 1). Diese Abhängigkeit ist beispielsweise dem Antrieb eines unabhängig erregten Gleichstromgenerators im Betrieb mit konstanter Last eigen.
3. Kennlinie mit nichtlinearem Drehmomentanstieg (Kurve 3 in Abb. 1). Typische Beispiele sind der Betrieb von Ventilatoren, Kreiselpumpen, Propellern. Bei diesen Mechanismen hängt das Moment Mc vom Quadrat der Winkelgeschwindigkeit ab ω... Dies ist das sogenannte Parabolische (Lüfter-)mechanische Charakteristik.
4. Kennlinie mit nichtlinear abnehmendem Widerstandsmoment (Kurve 4 in Abb. 1). Dabei ist das Schleppmoment umgekehrt proportional zur Drehzahl. In diesem Fall bleibt die Leistung über den gesamten Betriebsgeschwindigkeitsbereich des Mechanismus konstant. Beispielsweise ändert sich in den Mechanismen der Hauptbewegung einiger Metallbearbeitungsmaschinen (Drehen, Fräsen, Bohren) das Moment Mc umgekehrt proportional zu ω und die vom Mechanismus aufgenommene Leistung bleibt konstant.
Als mechanische Eigenschaften eines Elektromotors bezeichnet man die Abhängigkeit seiner Winkelgeschwindigkeit vom Drehmoment ωd = f (M). Dabei ist zu beachten, dass das Moment M an der Motorwelle unabhängig von der Drehrichtung ein positives Vorzeichen hat – das Bewegungsmoment. Gleichzeitig hat das Widerstandsmoment Mc ein negatives Vorzeichen.
Als Beispiele dienen die Abb. 2 zeigt die mechanischen Eigenschaften: 1 – Synchronmotor; 2 – Gleichstrommotor mit unabhängiger Erregung; 3 – Gleichstrommotor mit Reihenerregung.
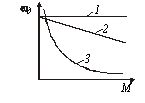 Reis. 2. Mechanische Eigenschaften von Elektromotoren
Reis. 2. Mechanische Eigenschaften von Elektromotoren
Zur Bewertung der mechanischen Eigenschaften eines Elektroantriebs wird das Konzept der charakteristischen Steifigkeit verwendet.Die Steifigkeit der mechanischen Kenngröße wird durch den Ausdruck bestimmt
β = dM / dω
wo dM – Änderung des Motordrehmoments; dωd – die entsprechende Änderung der Winkelgeschwindigkeit.
Bei linearen Kennlinien bleibt der Wert β konstant, bei nichtlinearen Kennlinien ist er betriebspunktabhängig.
Unter Verwendung dieses Konzepts ergeben sich die in Abb. 2, kann qualitativ wie folgt bewertet werden: 1 – absolut starr (β = ∞); 2 – fest; 3 – weich.
Eine absolut schwierige Eigenschaft: Die Motordrehzahl bleibt unverändert, wenn die Motorlast von Null auf Nennlast wechselt. Synchronmotoren haben diese Eigenschaft.
Starre Kennlinie – die Drehzahl ändert sich kaum, wenn die Last von Null auf Nennlast wechselt. Diese Kennlinie besitzen sowohl ein parallelerregter Gleichstrommotor als auch ein Induktionsmotor im Bereich des linearen Teils der Kennlinie.
Als starre Kennlinie gilt eine Kennlinie, bei der die Drehzahländerung etwa 10 % der Nenndrehzahl nicht überschreitet, wenn die Last von Null auf Nennlast wechselt.
Weiche Charakteristik – die Motorgeschwindigkeit ändert sich erheblich bei relativ kleinen Laständerungen. Diese Eigenschaft besitzt ein Gleichstrommotor mit Reihen-, Misch- oder Parallelerregung, jedoch mit zusätzlichem Widerstand im Ankerkreis, sowie asynchron mit Widerstand im Rotorkreis.
Für die meisten Produktionsmechanismen werden asynchrone Käfigläufermotoren verwendet, die starre mechanische Eigenschaften aufweisen.
Alle mechanischen Eigenschaften von Elektromotoren werden in natürliche und künstliche unterteilt.
Natürliche mechanische Eigenschaften beziehen sich auf die Betriebsbedingungen des Motors mit den Nennwerten der Parameter.
Beispielsweise kann für einen parallel erregten Motor die natürliche Kennlinie für den Fall aufgetragen werden, dass Ankerspannung und Erregerstrom Nennwerte haben und im Ankerkreis kein zusätzlicher Widerstand vorhanden ist.
Die natürliche Kennlinie eines Induktionsmotors entspricht der Nennspannung und Nennfrequenz des dem Motorstator zugeführten Wechselstroms, sofern im Rotorkreis kein zusätzlicher Widerstand vorhanden ist.
Somit kann für jeden Motor nur ein natürliches Merkmal aufgebaut werden und eine unbegrenzte Anzahl künstlicher. Beispielsweise hat jeder neue Wert des Ankerwiderstands eines Gleichstrommotors oder im Rotorkreis eines Induktionsmotors seine eigenen mechanischen Eigenschaften.
