Das Funktionsprinzip des Frequenzumrichters und die Kriterien für seine Auswahl für den Benutzer
 Eine kurze Beschreibung des Zwecks, der Funktionsweise und der Kriterien für die Auswahl eines Frequenzumrichters als Steuergerät für einen asynchronen Elektromotor.
Eine kurze Beschreibung des Zwecks, der Funktionsweise und der Kriterien für die Auswahl eines Frequenzumrichters als Steuergerät für einen asynchronen Elektromotor.
Käfigläufer-Induktionsmotor Heute ist es das massivste und zuverlässigste Gerät zur Steuerung verschiedener Maschinen und Mechanismen. Aber jede Medaille hat eine Kehrseite.
Die beiden Hauptnachteile des Induktionsmotors sind die Unmöglichkeit, einfach zu arbeiten Rotorgeschwindigkeitsregelung, sehr großer Anlaufstrom – fünf-, siebenmal so hoch wie der Nennstrom. Werden ausschließlich mechanische Steuergeräte eingesetzt, führen diese Nachteile zu großen Energieverlusten und stoßmechanischen Belastungen. Dies wirkt sich äußerst negativ auf die Lebensdauer der Geräte aus.
Frequenzumwandler

Frequenzumwandler mit Pulsweitensteuerung (PE mit PWM) reduziert Einschaltströme um das 4- bis 5-fache. Es sorgt für einen sanften Start des Induktionsmotors und steuert den Antrieb entsprechend einem vorgegebenen Spannungs-/Frequenzverhältnis.
Der Frequenzumrichter ermöglicht eine Energieeinsparung von bis zu 50 %. Es wird möglich, Rückmeldungen zwischen benachbarten Geräten zu ermöglichen, d.h. Selbstanpassende Ausrüstung an die Aufgabe und Änderung der Betriebsbedingungen des gesamten Systems.
Das Funktionsprinzip des Frequenzumrichters
Der PWM-Frequenzumrichter ist Doppelwandler-Wechselrichter… Zunächst wird die Netzspannung 220 bzw. 380 V durch die Eingangsdiodenbrücke gleichgerichtet, dann mit Kondensatoren geglättet und gefiltert.
Dies ist die erste Stufe der Transformation. In der zweiten Stufe, von konstanter Spannung, unter Verwendung von Steuermikroschaltungen und einer Ausgangsbrücke IGBT-Schalter, wird eine PWM-Sequenz mit einer bestimmten Frequenz und einem bestimmten Tastverhältnis gebildet. Am Ausgang des Frequenzumrichters werden Pakete von Rechteckimpulsen ausgegeben, die jedoch aufgrund der Induktivität der Statorwicklungen des Induktionsmotors integriert werden und schließlich in eine Spannung nahe einer Sinuskurve umgewandelt werden.
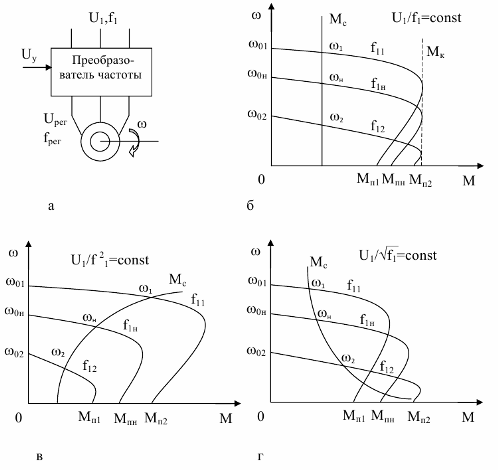 Mechanische Eigenschaften eines asynchronen Elektromotors mit Frequenzregelung der Drehzahl: a – Anschlussplan; b – Eigenschaften für eine Last mit einem konstanten statischen Widerstandsmoment; c – Lasteigenschaften des Ventilators; d – Eigenschaften des statischen Lastdrehmoments, umgekehrt proportional zur Drehwinkelgeschwindigkeit.
Mechanische Eigenschaften eines asynchronen Elektromotors mit Frequenzregelung der Drehzahl: a – Anschlussplan; b – Eigenschaften für eine Last mit einem konstanten statischen Widerstandsmoment; c – Lasteigenschaften des Ventilators; d – Eigenschaften des statischen Lastdrehmoments, umgekehrt proportional zur Drehwinkelgeschwindigkeit.
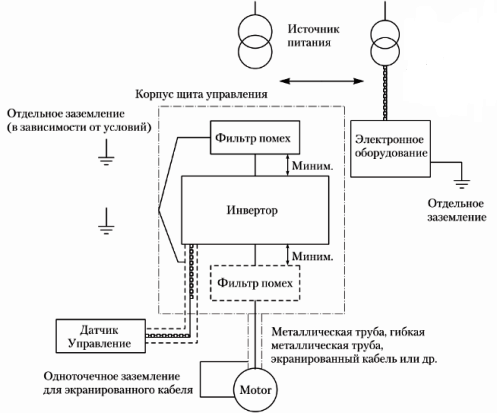 Eine typische Schaltung zum Einschalten eines Frequenzumrichters
Eine typische Schaltung zum Einschalten eines Frequenzumrichters 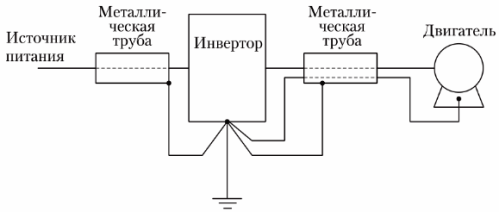 Ein Beispiel für den Anschluss von Stromleitungen (Kabeln) in einem Frequenzumrichterkreis
Ein Beispiel für den Anschluss von Stromleitungen (Kabeln) in einem Frequenzumrichterkreis
Kriterien für die Auswahl von Frequenzumrichtern

Durch die Kontrollmethode
Entsorgen Sie Wandler, die hinsichtlich Leistung, Leistungsart, Überlastfähigkeit etc. nicht geeignet sind, umgehend. Abhängig von der Art des Managements müssen Sie entscheiden, was Sie wählen möchten. Skalar- oder Vektorsteuerung.
Die meisten modernen Frequenzumrichter implementieren eine Vektorsteuerung, aber solche Frequenzumrichter sind teurer als Skalarfrequenzumrichter.
Die Vektorsteuerung ermöglicht eine präzisere Steuerung durch Reduzierung statischer Fehler. Der Skalarmodus unterstützt lediglich ein konstantes Verhältnis zwischen Ausgangsspannung und Ausgangsfrequenz, was aber beispielsweise für Lüfter völlig ausreichend ist.
Seit ihrer Einführung hat sich die Vektorsteuerung zu einer äußerst beliebten Steuerungsstrategie für Induktionsmotoren entwickelt. Derzeit implementieren die meisten Frequenzumrichter eine Vektorsteuerung oder sogar eine sensorlose Vektorsteuerung (dieser Trend ist bei Frequenzumrichtern zu beobachten, die ursprünglich eine Skalarsteuerung implementierten und keine Anschlüsse zum Anschluss eines Geschwindigkeitssensors hatten).
Das Grundprinzip der Vektorregelung besteht in der getrennten unabhängigen Regelung des Magnetisierungsstroms des Motors und des Quadraturstroms, zu dem das mechanische Drehmoment der Welle proportional ist. Der Magnetisierungsstrom bestimmt den Wert der Nullflussverkettung des Rotors und wird konstant gehalten.
Wenn sich die Drehzahl stabilisiert, wird der Quadraturstromsollwert mithilfe eines separaten PI-Reglers erzeugt, dessen Eingang die Abweichung zwischen der gewünschten und der gemessenen Motordrehzahl ist. Somit wird der Quadraturstrom immer auf den minimalen Wert eingestellt, um ausreichend mechanisches Drehmoment zur Aufrechterhaltung der eingestellten Geschwindigkeit bereitzustellen. Daher weist die Vektorsteuerung eine hohe Energieeffizienz auf.
Durch Macht
Wenn die Leistung der Geräte ungefähr gleich ist, wählen Sie Konverter derselben Firma mit einer Kapazität, die der Leistung der maximalen Last entspricht. Dadurch wird die Austauschbarkeit gewährleistet und die Wartung der Geräte vereinfacht. Es wird empfohlen, dass sich das Servicecenter des ausgewählten Frequenzumrichters in Ihrer Stadt befindet.
Über Netzspannung
Wählen Sie immer einen Wandler mit einem möglichst großen Spannungsbereich, sowohl nach unten als auch nach oben. Tatsache ist, dass das Wort „Standard“ bei lokalen Netzwerken nur Tränen zum Lachen bringen kann. Wenn die niedrige Spannung höchstwahrscheinlich dazu führt, dass der Frequenzumrichter stoppt, kann die erhöhte Spannung dazu führen, dass die Elektrolytkondensatoren des Netzes explodieren und der Eingang des Geräts ausfällt.
Nach Frequenzeinstellbereich

Durch die Anzahl der Steuereingänge
Zur Eingabe von Steuerbefehlen (Start, Stopp, Rückwärtsgang, Stopp usw.) sind diskrete Eingänge erforderlich. Für Rückmeldesignale (Stellung und Einstellung des Antriebs im Betrieb) werden analoge Eingänge benötigt. Für die Eingabe hochfrequenter Signale von digitalen Geschwindigkeits- und Positionssensoren sind digitale Eingänge erforderlich (Encoder). Die Anzahl der Eingänge kann nie zu groß sein, aber je mehr Eingänge, desto komplexer kann das System aufgebaut werden und desto teurer ist es.
Durch die Anzahl der Ausgangssignale
Über diskrete Ausgänge werden Signale für verschiedene Ereignisse ausgegeben (Alarm, Überhitzung, Eingangsspannung über oder unter dem Pegel, Fehlersignal usw.). Analoge Ausgänge werden zum Aufbau komplexer Rückkopplungssysteme verwendet. Auswahlempfehlungen ähneln dem vorherigen Absatz.
Steuerbus
Die Ausrüstung, mit der Sie den Frequenzumrichter steuern, muss über den gleichen Bus und die gleiche Anzahl an Ein-/Ausgängen wie der ausgewählte Frequenzumrichter verfügen. Lassen Sie etwas Platz für Ein- und Ausgänge für zukünftige Upgrades.
Unter Garantie
Die Garantiezeit ermöglicht indirekt eine Beurteilung der Zuverlässigkeit des Frequenzumrichters. Natürlich sollten Sie sich für einen Frequenzumrichter mit einer langfristigen Planung entscheiden.Manche Hersteller sehen speziell Schadensfälle vor, die nicht von der Garantie abgedeckt sind. Lesen Sie die Dokumentation immer sorgfältig durch und suchen Sie online nach Bewertungen von Gerätemodellen und Herstellern. Dies wird Ihnen helfen, die richtige Wahl zu treffen. Sparen Sie kein Geld für hochwertigen Service und Mitarbeiterschulung.
 Frequenzumrichter auf dem Ständer
Frequenzumrichter auf dem Ständer
Überlastfähigkeit
In erster Näherung sollte die Leistung des Frequenzumrichters 10-15 % größer als die Motorleistung gewählt werden. Der Strom des Umrichters sollte höher sein als der Nennstrom des Motors und etwas höher als der Strom möglicher Überlastungen.
Bei der Beschreibung eines bestimmten Mechanismus werden normalerweise die Überlastströme und die Dauer ihres Flusses angegeben. Lesen Sie die Dokumentation! Dies sorgt für gute Unterhaltung und verhindert möglicherweise künftige Schäden an der Ausrüstung. Wenn der Antrieb auch durch Stoßbelastungen (Spitzenbelastungen) gekennzeichnet ist (Belastungen für 2-3 Sekunden), muss ein Wandler für den Spitzenstrom ausgewählt werden. Nehmen Sie wieder eine Marge von 10 %.
Siehe auch zu diesem Thema: VLT AQUA Drive-Frequenzumrichter für Pumpeneinheiten