Auswahl von Elektromotoren für Hilfsantriebe von Metallschneidemaschinen
 Hilfsantriebe an Werkzeugmaschinen (Schnellantriebe für Bremssättel, Kopfpolster, Traversen etc.) arbeiten typischerweise im Kurzzeitlastbetrieb. Die Betriebsart des Elektroantriebs von einer solchen Dauer, bei der die Temperatur aller im Elektroantrieb enthaltenen Geräte während des Betriebs keinen stationären Wert erreicht und in einer Pause auf die Umgebungstemperatur absinkt, wird als Kurzzeitbetrieb bezeichnet.
Hilfsantriebe an Werkzeugmaschinen (Schnellantriebe für Bremssättel, Kopfpolster, Traversen etc.) arbeiten typischerweise im Kurzzeitlastbetrieb. Die Betriebsart des Elektroantriebs von einer solchen Dauer, bei der die Temperatur aller im Elektroantrieb enthaltenen Geräte während des Betriebs keinen stationären Wert erreicht und in einer Pause auf die Umgebungstemperatur absinkt, wird als Kurzzeitbetrieb bezeichnet.
Die Betriebszeit von Hilfsantrieben an Zerspanungsmaschinen ist in der Regel kurz; sie überschreitet nicht 5–15 s und erreicht nur bei schweren Maschinen 1–1,5 Minuten. Während dieser Zeit (t < 0,1T) hat der Elektromotor bei einer Überlastung innerhalb der zulässigen Grenzen keine Zeit, sich auch nur bis zur normalen Überhitzung aufzuheizen. Die Nennleistung des Elektromotors wird in diesem Fall durch die Überlastbedingungen bestimmt.
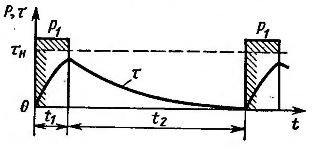
Reis. 1. Lastkurve für Kurzzeitbetrieb
Das Widerstandsmoment Mc beim Betrieb von Hilfsantrieben wird hauptsächlich durch Reibungskräfte erzeugt, weshalb diese Antriebe im Gegensatz zu Hauptantriebsantrieben ein erhebliches Anlaufdrehmoment benötigen.
Aufgenommene Leistung zur Überwindung von Reibungskräften beim Bewegen eines horizontal bewegten Maschinenelements:

wo Ftp – Reibungskraft, N; v – Geschwindigkeit, m/s; G – die Schwerkraft (Gewicht) der bewegten Einheit, N; μ – Reibungskoeffizient der Bewegung.
Motorwellenleistung P = Ptr /η,
wo η — c. P. D. Transmission, typischerweise η = 0,1 – 0,2.
Die Erwärmung des Elektromotors während des Betriebs im betrachteten Modus ist unbedeutend. Daher wird empfohlen, die zulässige Überlast zu verwenden.
Nennleistung Pn = Ptr /(λη),
wobei λ der Koeffizient der zulässigen Überlastung ist.
Grob kann davon ausgegangen werden, dass die Charakteristik des Motors in seinem Arbeitsteil klar ist. Dann die Winkelgeschwindigkeit des Motors im Überlastbetrieb
ωλ = ωО (1 — λсн),
wobei ωО = (πнО)/30- synchrone Winkelgeschwindigkeit des Elektromotors.
Ermitteln Sie mithilfe der Formel Pn = Ptr /(λη) das Überlastmoment des Motors
Das Widerstandsmoment zu Beginn des Motorstarts ist größer als während des Betriebs. Dieser Moment
wo μО – Reibungskoeffizient im Ruhezustand.
Das Verfahren zur Auswahl der Elektromotoren der Hilfsantriebe der Maschine
Zunächst wird mit der Formel Pn = Ptr /(λη) ein Elektromotor aus dem Katalog ausgewählt, für den dann das Anlaufmoment Mnach ermittelt wird. Berechnen Sie das Moment Mso nach der Formel und vergleichen Sie es mit dem Moment Mnach.Wenn 0,85 Mnig > Mso, dann ist der ausgewählte Motor für den Hilfsantrieb geeignet.
Antriebe zum Drehen und Heben von Maschineneinheiten werden auf ähnliche Weise berechnet, nur dass im letzteren Fall die Hauptlast häufig durch die Schwerkraft (Gewicht) der bewegten Einheit entsteht.
Es ist besonders wichtig, die optimale Geschwindigkeit zu wählen, um das Werkzeug schnell an das Werkstück heranzuführen. Beim Annähern an das Werkzeug wird die schnelle Bewegung durch eine langsame Bewegung mit Schnittgeschwindigkeit ersetzt. Diese Geschwindigkeitsänderung tritt auf, wenn sich das Werkzeug in einiger Entfernung vom Teil befindet, andernfalls trifft das Werkzeug mit hoher Geschwindigkeit auf das Teil und bricht.
Der Übergang von einer Geschwindigkeit zur anderen dauert einige Zeit. Während dieser Zeit werden elektrische Geräte aktiviert und die Bewegung läuft mit hoher Geschwindigkeit weiter. Die Reaktionszeit der Geräte ändert sich aufgrund von Spannungsschwankungen und dem Einfluss anderer Zufallsfaktoren.
Die optimale Geschwindigkeit wird durch die entsprechende Auswahl der Gänge in der kinematischen Kette erreicht. Eine weitere Zeitverkürzung ist durch eine stufenweise oder stufenlose automatische Reduzierung der Geschwindigkeit des letzten Straßenabschnitts möglich, die es ermöglicht, eine höhere Anfangsgeschwindigkeit einzunehmen.