Eigenschaften von Einphasen-Induktionsmotoren
Einphasen-Asynchronmotoren finden in der Technik und im Alltag breite Anwendung. Die Produktion von einphasigen Asynchron-Elektromotoren von einem Bruchteil eines Watts bis hin zu Hunderten von Watt macht mehr als die Hälfte der Produktion aller Maschinen mit geringer Leistung aus, und ihre Leistung nimmt ständig zu.
Einphasenmotoren werden im Allgemeinen in zwei Kategorien unterteilt:
-
Allzweckmotoren, darunter Industrie- und Haushaltselektromotoren;
-
Motoren automatischer Geräte – gesteuerte und ungesteuerte Wechselstrommotoren und spezielle elektrische Maschinen mit geringer Leistung (Tachogeneratoren, Rotationstransformatoren, Selsins usw.).
Ein erheblicher Anteil der asynchronen Elektromotoren sind Allzweckmotoren, die für den Betrieb in einem einphasigen Wechselstromnetz ausgelegt sind. Es gibt jedoch eine ziemlich umfangreiche Gruppe universeller asynchroner Elektromotoren, die sowohl für den Betrieb in einphasigen als auch in dreiphasigen Netzen ausgelegt sind.
Das Design von Universalmotoren unterscheidet sich praktisch nicht davon traditionelle Bauweise von Drehstrom-Asynchronmaschinen… Beim Betrieb an einem Drehstromnetz weisen diese Motoren ähnliche Eigenschaften wie Drehstrommotoren auf.
Einphasenmotoren verfügen über einen Käfigläufer und die Statorwicklung kann in verschiedenen Ausführungen gefertigt werden. Am häufigsten werden auf dem Stator eine Arbeitswicklung angebracht, die zwei Drittel der Nuten ausfüllt, und eine Startwicklung, die das verbleibende Drittel der Nuten ausfüllt. Die Laufspule ist für den Dauerbetrieb und die Startspule nur für die Anlaufphase ausgelegt. Daher besteht es aus Draht mit kleinem Querschnitt und enthält eine erhebliche Anzahl von Windungen. Um ein Anlaufdrehmoment zu erzeugen, enthält die Anlaufwicklung phasenverschiebende Elemente – Widerstände oder Kondensatoren.
Asynchronmotoren mit geringer Leistung können zweiphasig sein, wenn die auf dem Stator angeordnete Arbeitswicklung zwei Phasen aufweist, die im Raum um 90 ° gemischt sind. In einer der Phasen ist ständig ein Phasenverschiebungselement enthalten – ein Kondensator oder Widerstand Top, der für eine bestimmte Phasenverschiebung zwischen den Spulenströmen sorgt.
Normalerweise handelt es sich dabei um einen Motor mit einem Kondensator, der dauerhaft an eine der Phasen angeschlossen ist Kondensator… Die Kapazität des Phasenschieberkondensators kann konstant sein, in einigen Fällen kann der Kapazitätswert jedoch für den Start- und den Betriebsmodus unterschiedlich sein.
Ein charakteristisches Merkmal einphasiger Asynchronmotoren ist die Möglichkeit, den Rotor in verschiedene Richtungen zu drehen. Die Drehrichtung wird durch die Richtung des Anfangsdrehmoments bestimmt.
Bei niedrigem Rotorwiderstand (Ccr < 1) kann ein Einphasenmotor daher nicht im Rückwärtsmodus betrieben werden. Der Motorbetrieb entspricht den Rotorumdrehungen 0 <n <nc, bei höherer Drehzahl findet der Generatorbetrieb statt.
Charakteristisch für Einphasenmotoren ist, dass ihr maximales Drehmoment vom Widerstand des Rotors abhängt. Mit zunehmendem Wirkwiderstand des Rotors nimmt das maximale Drehmoment ab und wird bei großen Widerstandswerten Skr > 1 negativ.
Bei der Auswahl des Elektromotortyps zum Antrieb eines Geräts oder Mechanismus ist es notwendig, dessen Eigenschaften zu kennen. Die wichtigsten sind Drehmomenteigenschaften (anfängliches Startdrehmoment, maximales Drehmoment, minimales Drehmoment), Rotationsfrequenz und vibroakustische Eigenschaften. In manchen Fällen sind auch Energie- und Gewichtseigenschaften erforderlich.
Als Beispiel werden die Kennlinien eines Einphasenmotors mit folgenden Parametern berechnet:
-
Anzahl der Phasen – 1;
-
Netzfrequenz – 50 Hz;
-
Netzspannung – 220 V;
-
aktiver Widerstand der Statorwicklung – 5 Ohm;
-
induktiver Widerstand der Statorwicklung – 9,42 Ohm;
-
induktiver Widerstand der Rotorwicklung – 5,6 Ohm;
-
axiale Länge der Maschine – 0,1 m;
-
die Anzahl der Windungen in der Statorwicklung -320;
-
Statorlochradius – 0,0382 m;
-
Anzahl der Kanäle – 48;
-
Luftspalt – 1,0 x 103 m.
-
Rotorinduktivitätsfaktor 1,036.
Die einphasige Wicklung füllt zwei Drittel der Statornuten.
In Abb. 1 zeigt die Abhängigkeiten des Stroms eines einphasigen Elektromotors und des elektromagnetischen Schlupfmoments. Im idealen Leerlaufmodus hat der vom Netzwerk verbrauchte Motorstrom, der hauptsächlich zur Erzeugung eines Magnetfelds dient, einen relativ großen Wert.
Bei einem simulierten Motor beträgt die Größe des Magnetisierungsstroms etwa 30 % des Anfangsstroms, bei Drehstrommotoren mit gleicher Leistung 10–15 %.Das elektromagnetische Moment hat im idealen Leerlaufmodus einen negativen Wert, der mit zunehmendem Widerstand des Rotorkreises zunimmt. Bei rutschen C= 1, das elektromagnetische Moment ist Null, was den korrekten Betrieb des Modells bestätigt.
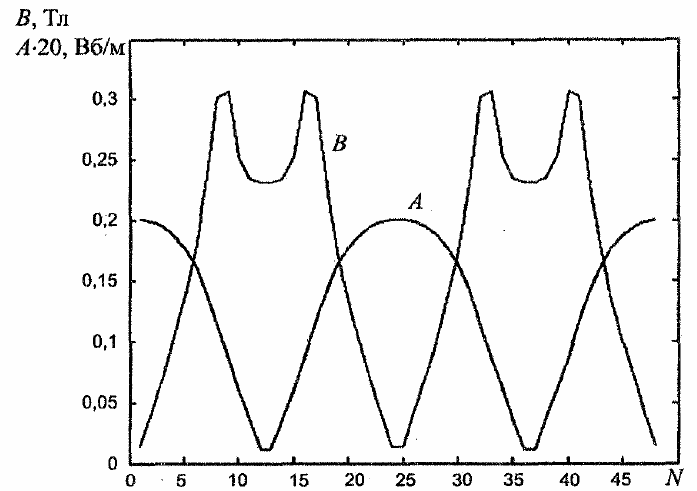
Feige. 1. Die Einhüllenden des Vektorpotentials und der magnetischen Induktion im Motorspalt beim Gleiten s = 1
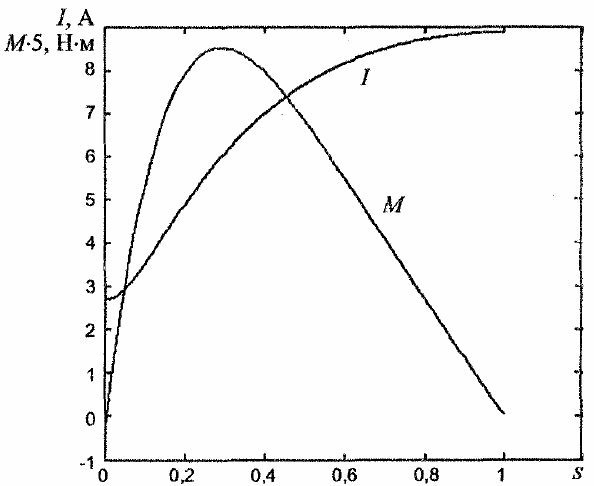
Reis. 2. Abhängigkeit des Stroms und des elektromagnetischen Drehmoments eines Einphasen-Asynchronmotors vom Schlupf
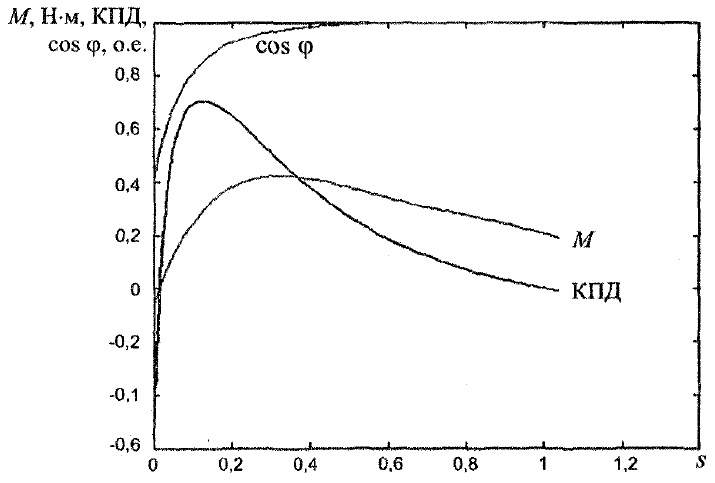
Die Abhängigkeiten von nutzbarer und verbrauchter Leistung vom Schlupf (Abb. 3) haben traditionellen Charakter. Der Wirkungsgrad des Motors im idealen Leerlaufmodus hat ein negatives Vorzeichen, das dem negativen Drehmoment entspricht, und der Leistungsfaktor ist in diesem Modus sehr niedrig (0,125 für den simulierten Motor).
Der geringere Wert des Leistungsfaktors im Vergleich zu Drehstrommotoren erklärt sich durch die hohe Größe des Magnetisierungsstroms. Mit zunehmender Belastung steigt der Wert des Leistungsfaktors und wird mit dem von Drehstrommotoren vergleichbar (Abb. 4).
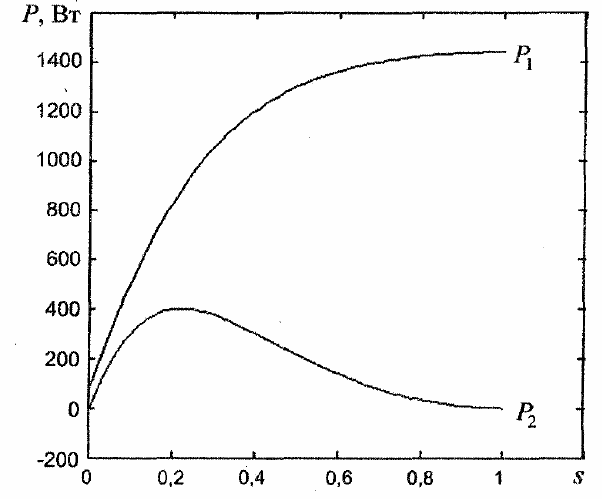
Reis. 3. Abhängigkeit der Nutz- und Aufnahmeleistung eines Einphasen-Asynchronmotors vom Schlupf
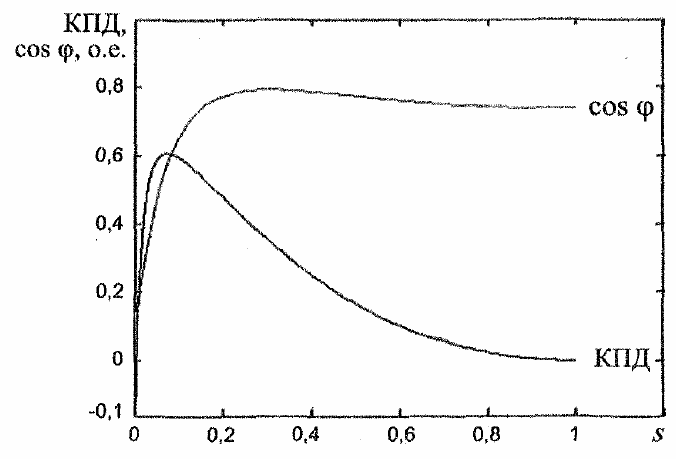
Reis. 4. Abhängigkeit des Nutzwirkungskoeffizienten und der Leistung eines einphasigen Asynchronmotors vom Schlupf
Wenn der aktive Widerstand des Rotors zunimmt, nimmt die Größe des elektromagnetischen Moments ab und wird bei kritischen Schlupfen über Eins negativ.
In Abb. In Abb. 5 zeigt die Abhängigkeit des elektromagnetischen Moments eines Einphasenschlupfmotors für verschiedene Werte der elektrischen Leitfähigkeit des Sekundärmediums des Motors.
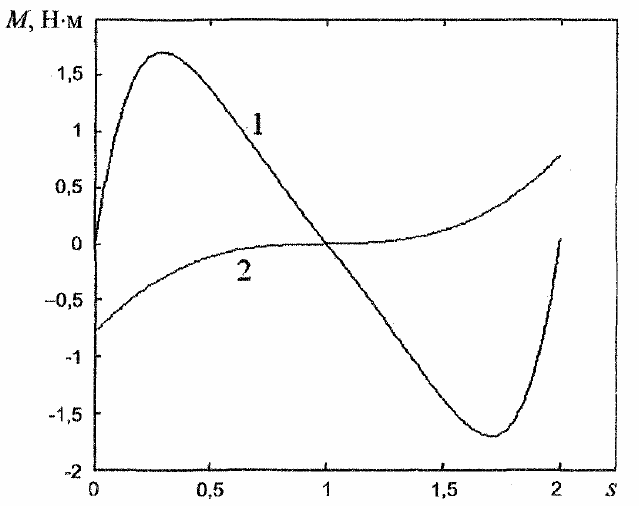
Reis. 5.Abhängigkeit des elektromagnetischen Moments eines Einphasenschlupfmotors bei unterschiedlichen Rotorwiderständen (1 — 17 x 106 Cm/m, 2 — 1,7 x 106 Cm/m)
Kondensatormotoren haben zwei Wicklungen, die fest mit dem Netz verbunden sind. Einer davon ist direkt an das Netzwerk angeschlossen, der zweite ist in Reihe mit einem Kondensator geschaltet, der für die nötige Phasenverschiebung sorgt.
Beide Wicklungen belegen die gleiche Anzahl von Nuten am Stator und die Anzahl ihrer Windungen sowie die Kapazität des Kondensators sind so berechnet, dass mit etwas Schlupf ein kreisförmiges rotierendes Magnetfeld entsteht. Am häufigsten wird der Nennschlupf als solcher akzeptiert. Allerdings fällt in diesem Fall das Anfangsdrehmoment deutlich kleiner aus als das Nenndrehmoment.
Das Magnetfeld im Anfangsmodus ist elliptisch; Der Einfluss der gegenläufigen Komponenten des Magnetfelds wird stark beeinflusst. Wenn die Kapazität des Kondensators erhöht wird, indem man ihn aus der Bedingung wählt, beim Start ein kreisförmiges Feld zu erhalten, dann kommt es zu einer Abnahme des Drehmoments und a Abnahme der Energieindikatoren bei Nennschlupf.
Eine dritte Variante ist ebenfalls möglich, wenn das kreisförmige Feld einem Schlupf mit einem größeren Betrag als im Nennmodus entspricht. Aber auch dieser Weg ist nicht optimal, da mit der Drehmomenterhöhung ein deutlicher Anstieg der Verluste einhergeht. Eine Erhöhung des Anlaufdrehmoments eines Kondensatormotors kann durch Erhöhung des Wirkwiderstands des Rotors erreicht werden. Diese Methode führt mit jedem Schlupf zu einer Erhöhung der Verluste, wodurch der Wirkungsgrad des Motors sinkt.
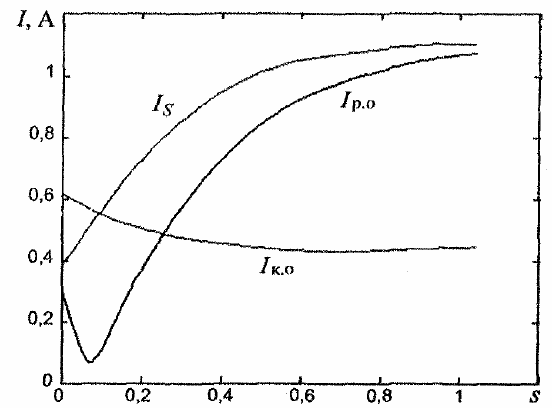
Reis. 6.Abhängigkeit der Schlupfkondensator-Motorströme (Azp.o – Betriebsspulenstrom, Azk.o – Kondensatorspulenstrom, E – Motorstrom)
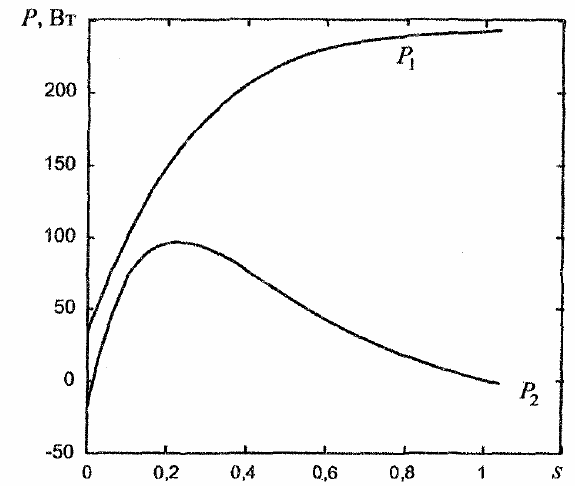
Reis. 7. Abhängigkeit von der verbrauchten P1- und der nutzbaren P2-Schlupfleistung eines Kondensators
Reis. 8. Abhängigkeit des Nutzwirkungskoeffizienten und der Leistung vom elektromagnetischen Moment des Schlupfkondensatormotors
Der Kondensatormotor verfügt über eine recht zufriedenstellende Energieleistung, einen hohen Leistungsfaktor, dessen Wert den Leistungsfaktor eines Dreiphasenmotors übersteigt, und bei erhöhtem Rotorwiderstand und erheblicher Kapazität ein hohes Anlaufdrehmoment. Gleichzeitig weist der Motor, wie oben erwähnt, einen verringerten Wirkungsgrad auf.
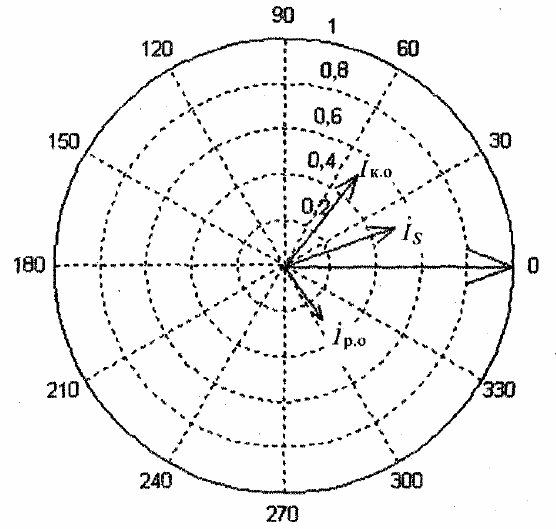
Reis. 9. Vektordiagramm eines Kondensatormotors bei Schlupf s = 0,1
Das Vektordiagramm (Abb. 9) zeigt, dass bei dem ausgewählten Wert der Kondensatorkapazität der Kondensatorspulenstrom relativ zur Netzwerkspannung voreilt und der Arbeitsspulenstrom nacheilt. Das Diagramm zeigt auch, dass das Magnetfeld des Motors elliptisch ist, wenn es sich dem Nennwert nähert. Um ein kreisförmiges Feld zu erhalten, muss der Kapazitätswert des Kondensators verringert werden, damit die Ströme in den beiden Spulen gleich groß sind.
Siehe auch zu diesem Thema:Einphasige Kondensatormotoren mit mehreren Drehzahlen