Phasenmesser – Zweck, Typen, Gerät und Wirkprinzip
 Als Phasenmesser wird ein elektrisches Messgerät bezeichnet, dessen Funktion darin besteht, den Phasenwinkel zwischen zwei elektrischen Schwingungen konstanter Frequenz zu messen. Mit einem Zeigermessgerät können Sie beispielsweise den Phasenwinkel in einem dreiphasigen Spannungsnetz messen. Phasenmesser werden häufig zur Bestimmung des Leistungsfaktors Cosinus Phi einer elektrischen Anlage verwendet. Daher werden Phasenmesser häufig bei der Entwicklung, Inbetriebnahme und dem Betrieb verschiedener elektrischer und elektronischer Geräte und Apparate eingesetzt.
Als Phasenmesser wird ein elektrisches Messgerät bezeichnet, dessen Funktion darin besteht, den Phasenwinkel zwischen zwei elektrischen Schwingungen konstanter Frequenz zu messen. Mit einem Zeigermessgerät können Sie beispielsweise den Phasenwinkel in einem dreiphasigen Spannungsnetz messen. Phasenmesser werden häufig zur Bestimmung des Leistungsfaktors Cosinus Phi einer elektrischen Anlage verwendet. Daher werden Phasenmesser häufig bei der Entwicklung, Inbetriebnahme und dem Betrieb verschiedener elektrischer und elektronischer Geräte und Apparate eingesetzt.
Wenn der Zeiger an den Messkreis angeschlossen ist, ist das Gerät mit dem Spannungskreis und dem Strommesskreis verbunden. Bei einem dreiphasigen Versorgungsnetz ist der Zeiger spannungsmäßig mit drei Phasen und strommäßig mit den Sekundärwicklungen von Stromwandlern ebenfalls dreiphasig verbunden.
Je nach Gerät des Phasenmessers ist auch ein vereinfachtes Anschlussschema möglich, wenn er auch über die Spannung an drei Phasen und über den Strom nur an zwei Phasen angeschlossen wird.Die dritte Phase wird dann berechnet, indem die Vektoren von nur zwei Strömen (zwei gemessenen Phasen) addiert werden. Zweck des Phasenmessers – Kosinus-Phi-Messung (Leistungsfaktor), daher werden sie im Volksmund auch „Cosinusmeter“ genannt.
Heutzutage gibt es zwei Arten von Phasenmessern: elektrodynamische und digitale. Elektrodynamische oder elektromagnetische Phasenmesser basieren auf einem einfachen Schema mit einem Proportionalmechanismus zur Messung der Phasenverschiebung. Zwei starr miteinander verbundene Rahmen, deren Winkel zwischen 60 Grad beträgt, sind auf den Achsen in den Stützen befestigt und es gibt kein entgegengesetztes mechanisches Moment.
Unter bestimmten Bedingungen, die durch Ändern der Phasenverschiebung der Ströme in den Stromkreisen dieser beiden Rahmen sowie des Befestigungswinkels dieser Rahmen zueinander eingestellt werden, wird der bewegliche Teil des Messgeräts um einen gleichen Winkel gedreht zum Phasenwinkel. Die lineare Skala des Geräts ermöglicht die Aufzeichnung des Messergebnisses.
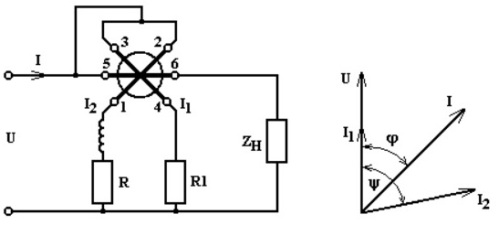
Schauen wir uns das Funktionsprinzip eines elektrodynamischen Phasenmessers an. Es verfügt über eine feste Stromspule I und zwei bewegliche Spulen. Durch jede der beweglichen Spulen fließen die Ströme I1 und I2. Die fließenden Ströme erzeugen magnetische Flüsse sowohl in der stationären Spule als auch in den beweglichen Spulen. Dementsprechend erzeugen die wechselwirkenden magnetischen Flüsse der Spulen zwei Drehmomente M1 und M2.
Die Werte dieser Momente hängen von der relativen Position der beiden Spulen, vom Drehwinkel des beweglichen Teils des Messgeräts ab und diese Momente sind in entgegengesetzte Richtungen gerichtet.Die Durchschnittswerte der Momente hängen von den in den beweglichen Spulen fließenden Strömen (I1 und I2), vom in der stationären Spule fließenden Strom (I) und von den Phasenverschiebungswinkeln der Ströme der beweglichen Spulen relativ zu den Strömen ab Strom in der stationären Spule (ψ1 und ψ2) und auf den Wicklungen der Designparameter.
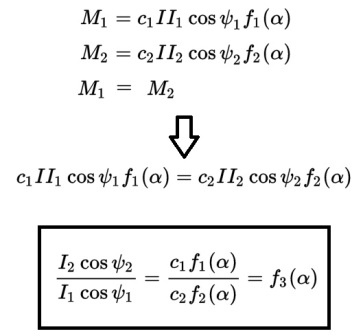
Dadurch dreht sich der bewegliche Teil des Gerätes unter der Wirkung dieser Momente, bis sich ein Gleichgewicht einstellt, das durch die Gleichheit der aus der Drehung resultierenden Momente entsteht. Die Skala des Phasenmessers kann hinsichtlich des Leistungsfaktors kalibriert werden.
Die Nachteile elektrodynamischer Phasenmesser sind die Abhängigkeit der Messwerte von der Frequenz und der erhebliche Energieverbrauch aus der untersuchten Quelle.
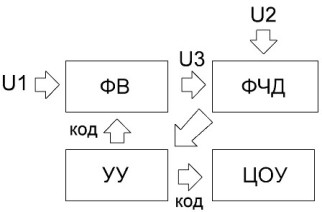
Digitale Phasenmesser können auf verschiedene Arten implementiert werden. Beispielsweise weist ein Kompensationsphasenmesser eine hohe Genauigkeit auf, auch wenn er im manuellen Modus betrieben wird. Bedenken Sie jedoch, wie er funktioniert. Es gibt zwei Sinusspannungen U1 und U2, deren Phasenverschiebung Sie kennen müssen.
Die Spannung U2 wird dem Phasenschieber (PV) zugeführt, der per Code von der Steuereinheit (UU) gesteuert wird. Die Phasenverschiebung zwischen U3 und U2 wird schrittweise geändert, bis ein Zustand erreicht ist, in dem U1 und U3 in Phase sind. Durch Anpassen des Vorzeichens der Phasenverschiebung zwischen U1 und U3 wird der phasenempfindliche Detektor (PSD) bestimmt.
Das Ausgangssignal des phasenempfindlichen Detektors wird der Steuereinheit (CU) zugeführt. Der Ausgleichsalgorithmus wird mit der Pulse-Code-Methode implementiert. Nachdem der Ausgleichsprozess abgeschlossen ist, drückt der Phasenverschiebungsfaktorcode (PV) die Phasenverschiebung zwischen U1 und U2 aus.
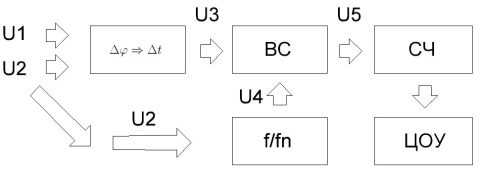
Die meisten modernen digitalen Phasenmesser nutzen das Prinzip der diskreten Zählung.Diese Methode funktioniert in zwei Schritten: Umwandeln der Phasenverschiebung in ein Signal einer bestimmten Dauer und anschließendes Messen der Dauer dieses Impulses mithilfe einer diskreten Zahl. Das Gerät enthält einen Phase-zu-Puls-Wandler, einen Zeitwähler (VS), einen diskreten Formungsimpuls (f/fn), einen Zähler (MF) und einen DSP.
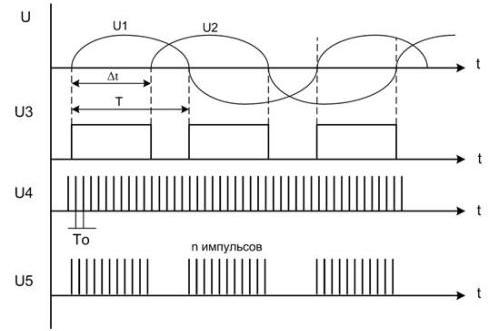
Aus U1 und U2 wird ein Phasen-Puls-Wandler mit einer Phasenverschiebung Δφ gebildet Rechteckimpulse U3 als Sequenz. Diese Impulse U3 haben eine Wiederholungsrate und ein Tastverhältnis, die dem Frequenz- und Zeitversatz der Eingangssignale U1 und U2 entsprechen. Die Impulse U4 und U3 bilden diskrete Leseimpulse der Periode T0, die an den Zeitwähler angelegt werden. Der Zeitwähler wiederum öffnet sich für die Dauer des U3-Impulses und schaltet durch die U4-Impulse. Als Ergebnis der Ausgabe des Zeitselektors werden Impulsstöße U5 erhalten, deren Wiederholungsperiode T beträgt.
Der Zähler (MF) zählt die Anzahl der Impulse im seriellen Paket U5, sodass die Anzahl der am Zähler (MF) empfangenen Impulse proportional zur Phasenverschiebung zwischen U1 und U2 ist. Der Code vom Zähler wird an die zentrale Leitstelle gesendet und die Messwerte des Geräts werden in Grad mit einer Genauigkeit von Zehnteln angezeigt, was durch den Grad der Diskretion des Geräts erreicht wird. Der Diskretheitsfehler hängt mit der Fähigkeit zusammen, Δt mit einer Genauigkeit von einer Impulszählperiode zu messen.
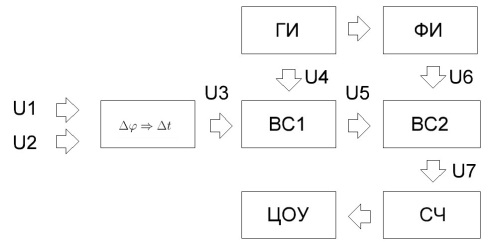
Elektronische Phasenmesser mit digitaler Cosinus-Phi-Mittelung können den Fehler durch Mittelung über mehrere Perioden T des Testsignals reduzieren.Die Struktur des digitalen Durchschnittsphasenmessers unterscheidet sich von der diskreten Schaltungszählung durch das Vorhandensein eines weiteren Zeitwählers (BC2) sowie eines Impulsgenerators (GP) und eines diskreten Impulsgenerators (PI).
Hier umfasst der Phasenverschiebungswandler U5 einen Impulsgenerator (PI) und einen Zeitselektor (BC1). Für einen kalibrierten Zeitraum Tk, der viel größer als T ist, werden dem Gerät mehrere Pakete zugeführt, an deren Ausgang mehrere Pakete gebildet werden, dies ist für die Mittelung der Ergebnisse notwendig.
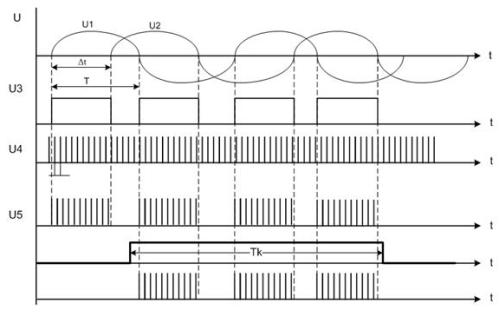
Die U6-Impulse haben eine Dauer, die ein Vielfaches von T0 beträgt, da der Pulsformer (PI) nach dem Prinzip der Frequenzteilung durch einen vorgegebenen Faktor arbeitet. Die Impulse des Signals U6 öffnen den Zeitwähler (BC2). Dadurch kommen mehrere Pakete an seinem Eingang an. Das U7-Signal wird dem Zähler (MF) zugeführt, der mit der zentralen Leitstelle verbunden ist. Die Auflösung des Gerätes wird durch den Satz U6 bestimmt.
Der Fehler des Phasenmessers wird auch durch die schlechte Genauigkeit der Festlegung der Phasenverschiebung durch den Wandler während des Zeitintervalls der Übergangszeitpunkte der Signale U2 und U1 durch Nullen beeinflusst. Diese Ungenauigkeiten werden jedoch verringert, wenn das Ergebnis der Berechnungen für eine Periode Tk gemittelt wird, die viel größer ist als die Periode der untersuchten Eingangssignale.
Wir hoffen, dass dieser Artikel Ihnen dabei geholfen hat, ein allgemeines Verständnis für die Funktionsweise von Phasenmessern zu erlangen. Ausführlichere Informationen findet man immer in Fachliteratur, davon gibt es heute glücklicherweise jede Menge im Internet.