Variabler Elektroantrieb zur Energieeinsparung
 Der Übergang vom ungeregelten Elektroantrieb zum geregelten Antrieb ist eine der wesentlichen Möglichkeiten zur Energieeinsparung im Elektroantrieb und im technologischen Bereich mittels Elektroantrieb.
Der Übergang vom ungeregelten Elektroantrieb zum geregelten Antrieb ist eine der wesentlichen Möglichkeiten zur Energieeinsparung im Elektroantrieb und im technologischen Bereich mittels Elektroantrieb.
In der Regel wird die Notwendigkeit, die Geschwindigkeit oder das Drehmoment der elektrischen Antriebe der Produktionsmechanismen zu steuern, durch die Anforderungen des technologischen Prozesses bestimmt. Beispielsweise bestimmt die Vorschubgeschwindigkeit des Fräsers die Sauberkeit der Bearbeitung eines Werkstücks auf einer Drehmaschine, die Reduzierung der Aufzugsgeschwindigkeit ist für die genaue Positionierung des Wagens vor dem Anhalten erforderlich, die Notwendigkeit, das Drehmoment der Wickelwelle anzupassen, wird durch diktiert die Bedingungen zur Aufrechterhaltung einer konstanten Spannungskraft des verwundeten Materials usw.
Es gibt jedoch eine Reihe von Mechanismen, die keine Änderung der Geschwindigkeit entsprechend den technologischen Bedingungen erfordern oder zur Regelung andere (nichtelektrische) Methoden zur Beeinflussung der Parameter des technologischen Prozesses verwenden.
Dazu gehören zunächst kontinuierliche Transportmechanismen zum Bewegen fester, flüssiger und gasförmiger Produkte: Förderer, Ventilatoren, Ventilatoren, Pumpeneinheiten. Für diese Mechanismen werden derzeit in der Regel ungeregelte asynchrone Elektroantriebe eingesetzt, die die Arbeitskörper unabhängig von der Belastung der Mechanismen mit konstanter Geschwindigkeit in Bewegung versetzen. Im Teillastbereich zeichnen sich Betriebsarten mit konstanter Drehzahl durch eine erhöhte Drehzahl aus spezifischer Energieverbrauch im Vergleich zum Nennmodus.
Bei einer NSC-Leistungsreduzierung nimmt die Effizienz des Förderers ab, da der relative Anteil der verbrauchten Leistung das Leerlaufmoment übersteigt. Sparsamer ist der variable Geschwindigkeitsmodus, der die gleiche Leistung, aber einen konstanten Anteil an Zugkraft bietet.
In Abb. In Abb. 1 zeigt die Leistungsabhängigkeiten der Motorwelle für einen Förderer mit einem Leerlaufmoment Mx = 0, ЗМв für konstante (v — const) und einstellbare (Fg = const) Geschwindigkeiten der Lastbewegung. Der schattierte Bereich in der Abbildung stellt die Energieeinsparungen dar, die durch die Geschwindigkeitsregelung erzielt werden.
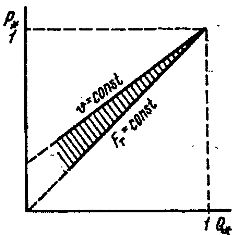
Reis. 1. Abhängigkeit der Leistung der Elektromotorwelle von der Leistung des Förderers
Wenn also die Fördergeschwindigkeit auf 60 % des Nennwerts reduziert wird, verringert sich die Wellenleistung des Motors um 10 % im Vergleich zum Nennwert. Die Wirkung der Geschwindigkeitsregelung ist umso größer, je größer das Leerlaufdrehmoment ist und desto stärker verringert sich die Leistung des Förderers.
Durch die Reduzierung der Geschwindigkeit kontinuierlicher Transportmechanismen mit Unterladung können Sie den erforderlichen Arbeitsumfang mit geringerem spezifischen Energieverbrauch ausführen, d. h. das rein wirtschaftliche Problem der Reduzierung des Energieverbrauchs im technologischen Prozess der Produktbewegung lösen.
Mit einer Verringerung der Geschwindigkeit solcher Mechanismen ergibt sich in der Regel auch ein wirtschaftlicher Effekt aufgrund der Verbesserung der Betriebseigenschaften der technologischen Ausrüstung. Wenn also die Geschwindigkeit abnimmt, nimmt der Verschleiß des Förderkörpers ab, die Lebensdauer von Rohrleitungen und Armaturen erhöht sich aufgrund der Abnahme des von Maschinen zur Flüssigkeits- und Gasversorgung entwickelten Drucks und der übermäßige Verbrauch dieser Produkte wird ebenfalls eliminiert.
Der Effekt im Bereich der Technik fällt oft deutlich höher aus als durch Energieeinsparungen, weshalb es grundsätzlich falsch ist, allein unter energetischen Aspekten über die Sinnhaftigkeit des Einsatzes eines gesteuerten Elektroantriebs für solche Mechanismen zu entscheiden.
Geschwindigkeitskontrolle von Schaufelmaschinen.
Zentrifugalmechanismen zur Versorgung mit Flüssigkeiten und Gasen (Ventilatoren, Pumpen, Ventilatoren, Kompressoren) sind die wichtigsten allgemeinen Industriemechanismen mit dem landesweit größten Potenzial, den spezifischen Energieverbrauch deutlich zu senken. Die Sonderstellung von Fliehkraftmechanismen erklärt sich durch ihre Massivität, in der Regel hohe Leistung bei langer Betriebsdauer.
Diese Umstände bestimmen den erheblichen Anteil dieser Mechanismen an der Energiebilanz des Landes.Die gesamte installierte Leistung der Antriebsmotoren für Pumpen, Lüfter und Kompressoren beträgt etwa 20 % der Leistung aller Kraftwerke, während Lüfter allein etwa 10 % des gesamten im Land produzierten Stroms verbrauchen.
Die Betriebseigenschaften der Zentrifugalmechanismen werden in Form von Abhängigkeiten der Förderhöhe H von der Durchflussmenge Q und der Leistung P von der Durchflussmenge Q dargestellt. Im stationären Betriebsmodus wird die vom Zentrifugalmechanismus erzeugte Förderhöhe durch ausgeglichen der Druck des hydro- oder aerodynamischen Netzwerks, in das Flüssigkeit oder Gas gefördert wird.
Die statische Komponente des Drucks wird bei Pumpen bestimmt – durch den geodätischen Unterschied zwischen den Niveaus des Benutzers und der Pumpe; für Fans – natürliche Attraktion; für Ventilatoren und Kompressoren – aus dem Druck des komprimierten Gases im Netzwerk (Reservoir).
Der Schnittpunkt der Q-H-Eigenschaften der Pumpe und des Netzwerks bestimmt die Parameter H-Hn und Q — Qn. Die Regelung des Durchflusses Q einer mit konstanter Drehzahl arbeitenden Pumpe erfolgt üblicherweise über ein Ventil am Auslass und führt zu einer Änderung der Kennlinie des Netzes, wodurch der Durchfluss QA * <1 entspricht der Schnittpunkt mit der Kennlinie der Pumpe.
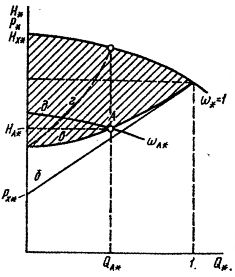
Reis. 2. Q-H-Eigenschaften der Pumpeinheit
Analog zu elektrischen Schaltkreisen ähnelt die Regulierung des Durchflusses durch ein Ventil der Steuerung des Stroms durch Erhöhung des elektrischen Widerstands des Schaltkreises. Offensichtlich ist diese Regelungsmethode aus energetischer Sicht nicht effizient, da sie mit unproduktiven Energieverlusten in den Regelelementen (Widerstand, Ventil) einhergeht. Der Klappenverlust ist durch den schattierten Bereich in Abb. gekennzeichnet. 1.
Wie im Stromkreis ist es wirtschaftlicher, die Energiequelle zu regulieren als ihren Nutzer. In diesem Fall sinkt der Laststrom in den Stromkreisen aufgrund einer Abnahme der Quellenspannung. In hydraulischen und aerodynamischen Netzwerken wird ein ähnlicher Effekt durch die Reduzierung des vom Mechanismus erzeugten Drucks erzielt, was durch die Reduzierung der Drehzahl seines Laufrads erreicht wird.
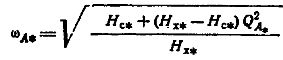
Wenn sich die Geschwindigkeit ändert, ändern sich die Betriebseigenschaften von Zentrifugalmechanismen gemäß den Ähnlichkeitsgesetzen, die die Form haben: Q * = ω *, H * = ω *2, P * = ω *3
Die Drehzahl des Pumpenlaufrads, bei der die Kennlinie den Punkt A durchläuft:
Der Ausdruck für die von der Pumpe während der Drehzahlregelung aufgenommene Leistung lautet:

Die quadratische Abhängigkeit des Moments von der Drehzahl ist vor allem für Ventilatoren charakteristisch, da der durch den Eigenschub bedingte statische Anteil der Förderhöhe deutlich kleiner als Hx ist. In der Fachliteratur wird teilweise eine näherungsweise Abhängigkeit des Moments von der Geschwindigkeit verwendet, die dieser Eigenschaft des Fliehkraftmechanismus Rechnung trägt:
M* = ω *n
wobei n = 2 bei Hc = 0 und nHc > 0. Berechnungen und Experimente zeigen, dass n=2 — 5 und seine großen Werte charakteristisch für Kompressoren sind, die in einem Netzwerk mit erheblichem Gegendruck betrieben werden.
Die Analyse der Pumpenbetriebsarten bei konstanter und variabler Drehzahl zeigt, dass der Mehrenergieverbrauch bei ω= const sehr groß ausfällt. Nachfolgend sind beispielsweise die Ergebnisse der Berechnung der Betriebsarten der Pumpe mit den Parametern Hx * = 1,2; Px*= 0,3 auf einem Netzwerk mit unterschiedlichem Gegendruck Зс:
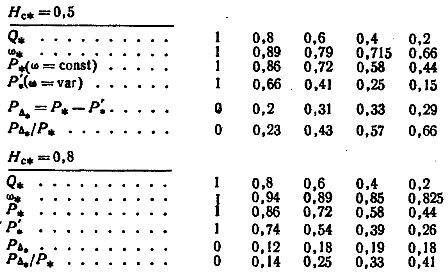
Die angegebenen Daten zeigen, dass der gesteuerte Elektroantrieb den Verbrauch des verbrauchten Stroms deutlich reduzieren kann: bis zu 66 % im ersten Fall und bis zu 41 % im zweiten Fall. In der Praxis kann dieser Effekt sogar noch höher ausfallen, da aus verschiedenen Gründen (Fehlen oder Fehlfunktion von Ventilen, manuelle Betätigung) auf eine Regelung durch Ventile überhaupt verzichtet wird, was nicht nur zu einem Anstieg des Stromverbrauchs führt, sondern auch zu übermäßigen Aufwänden und Kosten im Wassernetz führen.
Die Energieprobleme einfachwirkender Zentrifugalmechanismen in einem Netzwerk mit konstanten Parametern wurden oben diskutiert. In der Praxis gibt es einen Parallelbetrieb von Zentrifugalmechanismen und das Netzwerk weist häufig variable Parameter auf. Beispielsweise ändert sich der aerodynamische Widerstand des Bergbaunetzes mit einer Änderung der Wandlänge, der hydrodynamische Widerstand der Wasserversorgungsnetze wird durch die sich im Tagesverlauf ändernde Art des Wasserverbrauchs bestimmt usw.
Beim Parallelbetrieb von Fliehkraftmechanismen sind zwei Fälle möglich:
1) die Geschwindigkeit aller Mechanismen wird gleichzeitig und synchron reguliert;
2) Die Geschwindigkeit eines Mechanismus oder eines Teils der Mechanismen wird reguliert.
Wenn die Netzwerkparameter konstant sind, können im ersten Fall alle Mechanismen als ein Äquivalent betrachtet werden, für das alle oben genannten Beziehungen gelten. Im zweiten Fall hat der Druck des ungeregelten Teils der Mechanismen auf den geregelten Teil die gleiche Wirkung wie der Gegendruck und ist sehr groß, weshalb die Stromeinsparung hier 10-15 % der Nennleistung nicht überschreitet der Maschine.
Variable Netzwerkparameter erschweren die Analyse der Zusammenarbeit von Zentrifugalmechanismen mit dem Netzwerk erheblich. Dabei lässt sich die Energieeffizienz eines geregelten Elektroantriebs in Form einer Fläche ermitteln, deren Grenzen den Grenzwerten der Netzparameter und der Drehzahl des Fliehkraftmechanismus entsprechen.
Siehe auch zu diesem Thema: VLT AQUA Drive-Frequenzumrichter für Pumpeneinheiten