Umkehren und Stoppen des Käfigläufer-Induktionsmotors
Ein Induktionsmotor ist eine umkehrbare Maschine. Um die Drehrichtung des Rotors zu ändern, muss die Drehrichtung des Magnetfelds geändert werden (durch Vertauschen der Versorgungskabel mit den Anschlüssen der beiden Phasen des Motors) – Motorstart- und Bremskreise
Die mechanischen Eigenschaften für zwei Drehrichtungen sind in Abb. dargestellt. 1.
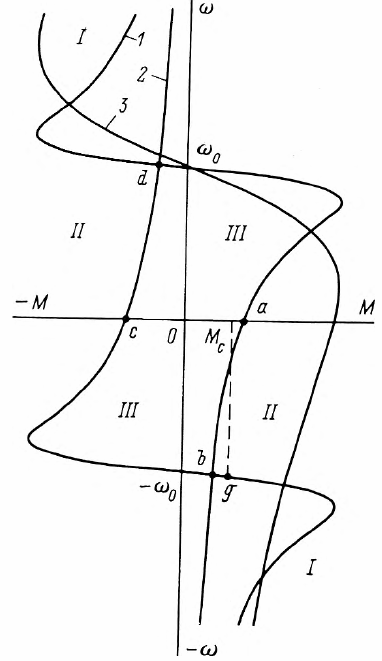
Reis. 1. Familie mechanischer Eigenschaften eines Induktionsmotors für reversiblen Betrieb im Stoppmodus mit Energieversorgung des Netzwerks (I), Oppositionsmodus (II) und Motor (III) 1, 2 – natürlich; 3 – künstlich.
Ein Käfigläufermotor kann nicht nur als Motor, sondern auch als Bremse eingesetzt werden. Im Stoppmodus arbeitet jeder Elektromotor stets als Generator. In diesem Fall kann ein Induktionselektromotor mit Käfigläufer über drei Bremsmodi verfügen.
Im regenerativen Bremsmodus arbeitet die Maschine mit negativem Schlupf. In diesem Fall übersteigt die Drehzahl des Rotors die Rotationsgeschwindigkeit des Magnetfeldes.Um in diesen Modus zu wechseln, muss natürlich ein externes aktives Moment seitlich auf die Welle aufgebracht werden.
Der Feedback-Modus wird häufig in Hebeanlagen eingesetzt. Während des Abstiegs kann das Antriebssystem aufgrund der potentiellen Energie der Last eine Geschwindigkeit erreichen, die über der Rotationsgeschwindigkeit des Magnetfelds liegt, und der Abstieg erfolgt in einem Gleichgewichtszustand, der einem bestimmten Punkt g auf der mechanischen Kennlinie entspricht , wenn das durch die absinkende Last erzeugte statische Moment durch das Motorbremsmoment ausgeglichen wird.
Bei herkömmlichen Antrieben mit statischem Blinddrehmoment wird der jeweilige Modus nur durch spezielle Regelkreise realisiert, die eine Reduzierung der Drehzahl des Magnetfeldes ermöglichen. Die mechanischen Eigenschaften einer Induktionsmaschine für den Feedback-Modus sind in der gleichen Abbildung dargestellt. 1.
Wie gezeigt, ist das maximale Drehmoment im Generatormodus etwas höher als im Motormodus und der kritische Schlupf in absoluten Werten ist gleich.
Asynchrongeneratoren als solche haben nämlich einen sehr engen Bereich Windkraftanlagen... Da die Windstärke nicht konstant ist und sich dementsprechend die Drehzahl des Gerätes deutlich ändert, ist unter diesen Bedingungen ein Asynchrongenerator vorzuziehen.
Am weitesten verbreitet ist der Bremsmodus – Opposition. Der Übergang in diesen Modus ist sowohl bei Asynchronmotoren als auch bei Gleichstrommotoren in zwei Fällen möglich (Abb. 1): bei deutlicher Erhöhung des statischen Drehmoments (Abschnitt ab) oder beim Umschalten der Statorwicklung auf eine andere Drehrichtung ( Abschnitt cd).
In beiden Fällen läuft der Motor mit einem Schlupf größer 1, bis die Ströme die Anlaufströme überschreiten. Daher kann dieser Modus bei einem Käfigläufermotor nur zum schnellen Stoppen des Antriebs verwendet werden.
Beim Erreichen der Nulldrehzahl muss der Motor vom Netz getrennt werden, da er sonst dazu tendiert, in die entgegengesetzte Richtung zu beschleunigen.
Beim Bremsen durch Gegenläufermotoren muss ein Rheostatwiderstand in den Rotorkreis eingeführt werden, um den Strom zu begrenzen und das Bremsmoment zu erhöhen.
Es ist auch möglich dynamischer Bremsmodus… Dies wirft jedoch einige Schwierigkeiten auf. Wenn der Motor vom Netz getrennt wird, verschwindet auch das Magnetfeld der Maschine. Es ist möglich, eine Induktionsmaschine aus einer Gleichstromquelle zu erregen, die an einen vom Wechselstromnetz getrennten Stator angeschlossen ist. Die Quelle sollte einen Strom in der Statorwicklung nahe dem Nennstrom liefern. Da dieser Strom nur durch den elektrischen Widerstand der Spule begrenzt wird, muss die DC-Quellenspannung niedrig sein (typischerweise 10 – 12 V).
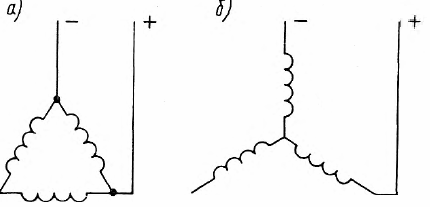
Reis. 2. Anschließen des Stators eines Induktionsmotors an eine Gleichstromquelle im dynamischen Bremsmodus bei Anschluss in Dreieck (a) und Stern (b)
Selbsterregung wird auch beim dynamischen Bremsen genutzt. Die Kondensatoren werden an den vom Netz getrennten Stator angeschlossen.
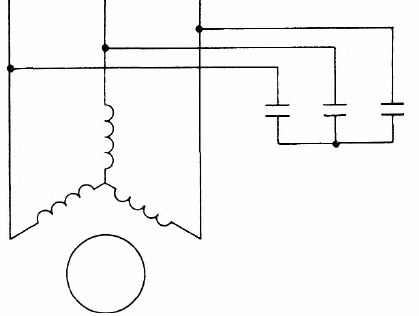
Reis. 3. Schematische Darstellung der dynamischen Bremsung eines selbsterregten Induktionsmotors
Während sich der Rotor dreht, entsteht aufgrund der Restmagnetisierung und des Stromflusses durch die Statorwicklungen sowie durch die Kondensatoren eine EMK im Statorkreis.Bei Erreichen einer bestimmten Drehzahl im Statorkreis kommt es zu Resonanzzuständen: Die Summe der induktiven Widerstände entspricht dem kapazitiven Widerstand. Es beginnt ein intensiver Prozess der Selbsterregung der Maschine, der zu einem Anstieg der EMF führt. Der Selbsterregungsmodus endet, wenn die EMK der Maschine E und der Spannungsabfall an den Kondensatoren gleich sind.
Das maximale Bremsmoment verschiebt sich mit zunehmender Leistung zu niedrigeren Drehzahlen. Die Nachteile des betrachteten Bremsmodus bestehen darin, dass die Bremswirkung nur innerhalb einer bestimmten Geschwindigkeitszone auftritt und dass zum Bremsen bei niedrigen Geschwindigkeiten große Kondensatoren verwendet werden müssen.
Der Vorteil ist, dass keine zusätzliche Stromquelle erforderlich ist. Dieser Modus wird immer in Anlagen eingesetzt, in denen eine Kondensatorbank an den Motor angeschlossen ist, um den Leistungsfaktor des Versorgungsnetzes zu verbessern.
Siehe auch zu diesem Thema: Bremskreise für Asynchronmotoren