Thyristor-Spannungsregler
 Thyristor-Spannungsregler sind Geräte zur Steuerung der Drehzahl und des Drehmoments von Elektromotoren. Die Drehzahl- und Drehmomentregelung erfolgt durch Änderung der dem Stator des Motors zugeführten Spannung und durch Änderung des Öffnungswinkels der Thyristoren. Diese Methode der Motorsteuerung wird Phasensteuerung genannt. Bei dieser Methode handelt es sich um eine Art parametrische (Amplituden-)Steuerung.
Thyristor-Spannungsregler sind Geräte zur Steuerung der Drehzahl und des Drehmoments von Elektromotoren. Die Drehzahl- und Drehmomentregelung erfolgt durch Änderung der dem Stator des Motors zugeführten Spannung und durch Änderung des Öffnungswinkels der Thyristoren. Diese Methode der Motorsteuerung wird Phasensteuerung genannt. Bei dieser Methode handelt es sich um eine Art parametrische (Amplituden-)Steuerung.
Thyristor-Spannungsregler können sowohl mit geschlossenen als auch mit offenen Steuersystemen implementiert werden. Regler mit offenem Regelkreis bieten keine zufriedenstellende Leistung bei der Geschwindigkeitsregelung. Ihr Hauptzweck besteht darin, das Drehmoment anzupassen, um bei dynamischen Vorgängen die gewünschte Betriebsart des Antriebs zu erreichen.
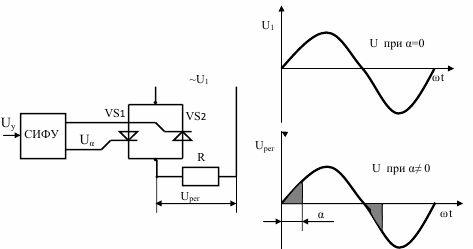
Ein vereinfachtes Schema eines Thyristor-Spannungsreglers
Der Leistungsteil des einphasigen Thyristor-Spannungsreglers besteht aus zwei gesteuerten Thyristoren, die bei einer sinusförmigen Eingangsspannung den Stromfluss an der Last in zwei Richtungen gewährleisten.
In der Regel werden Thyristorsteller mit geschlossenem Regelkreis mit negativer Drehzahlrückführung eingesetzt, was im Bereich niedriger Drehzahlen ausreichend steife mechanische Eigenschaften des Antriebs ermöglicht.
Der effektivste Einsatz von Thyristorreglern zur Drehzahl- und Drehmomentregelung Asynchronläufermotoren.
Versorgungskreise von Thyristorreglern
In Abb. 1, a-e zeigen mögliche Schemata für die Einbeziehung der Gleichrichterelemente des Reglers in eine Phase. Das häufigste davon ist das Diagramm in Abb. 1, a. Es kann für jedes Anschlussschema der Statorwicklungen verwendet werden. Der zulässige Strom durch die Last (Effektivwert) in diesem Stromkreis im Dauerstrommodus beträgt:

wobei Azt der zulässige Durchschnittswert des Stroms durch den Thyristor ist.
Maximale Vorwärts- und Rückwärts-Thyristorspannung

wobei kzap der Sicherheitsfaktor ist, der unter Berücksichtigung möglicher Schaltüberspannungen im Stromkreis gewählt wird; — der Effektivwert der Netzspannung.
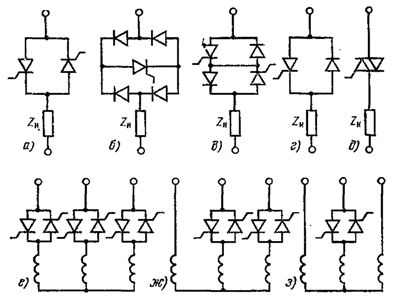
Reis. 1. Schemata der Stromkreise von Thyristor-Spannungsreglern.
Im Diagramm von Abb. In 1b ist nur ein Thyristor in der Diagonale der Brücke aus ungesteuerten Dioden enthalten. Das Verhältnis zwischen Last- und Thyristorstrom für diese Schaltung beträgt:

Ungesteuerte Dioden werden für einen Strom ausgewählt, der halb so groß ist wie der eines Thyristors. Maximale Durchlassspannung zum Thyristor
Die Sperrspannung des Thyristors liegt nahe Null.
Das Diagramm in Abb. 1b weist einige Unterschiede zum Schema von Abb. auf. 1, aber für den Aufbau des Managementsystems. Im Diagramm von Abb. 1 und die Steuerimpulse für jeden der Thyristoren müssen der Frequenz der Stromversorgung folgen. Im Diagramm von Abb.Im Vergleich zu 1b ist die Frequenz der Steuerimpulse doppelt so hoch.
Das Diagramm in Abb. 1, c, bestehend aus zwei Thyristoren und zwei Dioden, Steuerung, Last, Strom und maximale Durchlassspannung der Thyristoren ähneln möglichst dem Diagramm in Abb. 1, a.
Die Sperrspannung in diesem Stromkreis liegt aufgrund der Nebenschlusswirkung der Diode nahe bei Null.
Das Diagramm in Abb. 1d ähnelt in Bezug auf Strom und maximale Vorwärts- und Rückwärtsspannung der Thyristoren der Schaltung in Abb. 1d. 1, a. Das Diagramm in Abb. 1, d unterscheidet sich von den betrachteten Anforderungen an das Steuersystem, um den notwendigen Variationsbereich des Thyristor-Steuerwinkels bereitzustellen. Wenn der Winkel von der Nullphasenspannung aus gezählt wird, dann gilt für die Schaltungen in Abb. 1, a-c, die Beziehung
wo φ- Phasenwinkel der Last.
Für die Schaltung von Abb. 1, d, ein ähnliches Verhältnis hat die Form:
Erschwerend kommt hinzu, dass der Bereich der Winkeländerung vergrößert werden muss Thyristor-Steuerungssystem… Das Diagramm in Abb. 1, d kann angewendet werden, wenn die Statorwicklungen im Stern ohne Neutralleiter und im Dreieck mit den in den Außenleitern enthaltenen Gleichrichtern geschaltet sind. Der Anwendungsbereich dieses Schemas ist auf irreversible sowie reversible elektrische Antriebe mit Rückwärtskontakt beschränkt.
Das Diagramm in Abb. 4-1, e ähnelt in seinen Eigenschaften dem Schema in Abb. 1, a. Der Triac-Strom ist dabei gleich dem Laststrom und die Frequenz der Steuerimpulse ist gleich der doppelten Frequenz der Versorgungsspannung. Der Nachteil einer Triac-Schaltung ist deutlich geringer als bei herkömmlichen Thyristoren, die zulässigen Werte du/dt und di/dt.
Für Thyristorregler ist das rationalste Schema in Abb. 1 dargestellt. 1, jedoch mit zwei antiparallel geschalteten Thyristoren.
Die Stromkreise der Regler sind mit antiparallelen Thyristoren in allen drei Phasen (symmetrischer Drehstromkreis), in zwei und einer Phase des Motors, realisiert, wie in Abb. 1, f, g bzw. h.
Bei Reglern für Kranelektroantriebe ist der in Abb. 1 dargestellte symmetrische Schaltkreis am weitesten verbreitet. 1, e, das sich durch die geringsten Verluste aus höheren harmonischen Strömen auszeichnet. Die größeren Verluste in Schaltungen mit vier und zwei Thyristoren werden durch das Spannungsungleichgewicht in den Motorphasen bestimmt.
Grundlegende technische Daten für Thyristorregler der PCT-Serie
Thyristorregler der PCT-Serie sind Geräte zum Ändern (gemäß einem bestimmten Gesetz) der Spannung, die dem Stator eines Induktionsmotors mit gewickeltem Rotor zugeführt wird. Thyristorregler der PCT-Serie sind nach einem symmetrischen dreiphasigen Schaltkreis aufgebaut (Abb. 1, e). Der Einsatz von Reglern der angegebenen Baureihe in Kranelektroantrieben ermöglicht die Regelung der Drehzahl im Bereich 10:1 und die Regelung des Motordrehmoments im dynamischen Modus beim Anfahren und Stoppen.
Thyristorregler der PCT-Serie sind für Dauerströme von 100, 160 und 320 A (maximale Ströme von 200, 320 und 640 A) und Spannungen von 220 und 380 V AC ausgelegt. Der Regler besteht aus drei auf einem gemeinsamen Rahmen montierten Netzteilen (entsprechend der Phasenzahl der antiparallel geschalteten Thyristoren), einer Stromsensoreinheit und einer Automatisierungseinheit. Die Netzteile verwenden Tablet-Thyristoren mit Kühlern aus extrudiertem Aluminiumprofil. Luftkühlung – natürlich. Der Automatisierungsblock ist für alle Versionen der Regler gleich.
Die Thyristorregler werden mit der Schutzart IP00 hergestellt und sind für die Montage auf Standard-Magnetreglerrahmen vom Typ TTZ vorgesehen, die im Design den Reglern der Serien TA und TCA ähneln. Die Gesamtabmessungen und das Gewicht der Regler der PCT-Serie sind in der Tabelle aufgeführt. 1.
Tabelle 1 Gesamtabmessungen und Gewicht der Spannungsregler der PCT-Serie

TTZ-Magnetregler sind mit Richtungsschützen zum Umkehren des Motors, Schützen des Rotorkreises und anderen Relaiskontaktelementen des Elektroantriebs ausgestattet, die den Regler mit dem Thyristorregler kommunizieren. Der Aufbau der Reglersteuerung ist aus dem Funktionsschema des Elektroantriebs in Abb. ersichtlich. 2.
Der dreiphasige symmetrische Thyristorblock T wird durch das SFU-Phasensteuerungssystem gesteuert. Mit dem Regler KK im Regler wird die Drehzahleinstellung von BZS verändert. Über den Block BZS wird im Zeitverlauf das Beschleuniger KU2 im Rotorkreis gesteuert. Die Differenz zwischen den Referenzsignalen und dem Tachogenerator TG wird durch die Verstärker U1 und UZ verstärkt. An den Ausgang des Verstärkers UZ ist ein Logikrelais angeschlossen, das zwei stabile Zustände aufweist: Einer entspricht dem Einschalten des Vorwärtsrichtungsschützes KB, der zweite - zum Einschalten des Vorwärtsschützes in Rückwärtsrichtung KN.
Gleichzeitig mit einer Zustandsänderung des Logikgeräts wird das Signal im Steuerstromkreis der Schaltanlage umgekehrt. Das Signal vom Anpassungsverstärker U2 wird mit dem verzögerten Rückkopplungssignal des Motorstatorstroms summiert, das vom Strombegrenzungsblock TO kommt und dem Eingang der SFU zugeführt wird.
Der Logikblock BL wird außerdem durch das Signal des Stromsensors DT und des Strompräsenzmoduls NT beeinflusst, das das Schalten der Richtungsschütze unter Spannung verhindert. Die BL-Einheit führt außerdem eine nichtlineare Korrektur des Geschwindigkeitsstabilisierungssystems durch, um die Stabilität des Antriebs sicherzustellen. Regler können in elektrischen Antrieben von Hub- und Fahrwerken eingesetzt werden.
Die Regler der PCT-Serie sind mit einem Strombegrenzungssystem ausgestattet. Die Höhe der Strombegrenzung zum Schutz von Thyristoren vor Überlastung und zur Begrenzung des Motordrehmoments im dynamischen Modus variiert stufenlos von 0,65 bis 1,5 des Nennstroms des Reglers, die Höhe der Strombegrenzung zum Schutz vor Überstrom reicht von 0,9 bis. 2,0 Nennstrom des Reglers. Eine Vielzahl von Schutzeinstellungen ermöglicht den Betrieb eines Reglers gleicher Normgröße mit Motoren, die sich in der Leistung um etwa den Faktor 2 unterscheiden.
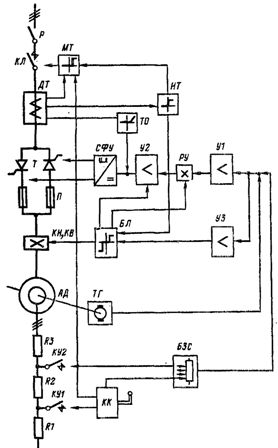
Reis. 2. Funktionsschema eines Elektroantriebs mit PCT-Thyristorregler: KK – Befehlsregler; TG – Tachogenerator; KN, KB – Richtungsschütze; BZS – Geschwindigkeitseinstellblock; BL – Logikblock; U1, U2. USA – Verstärker; SFU – Phasenkontrollsystem; DT – Stromsensor; IT – aktuelle Präsenzeinheit; TO – Strombegrenzungseinheit; MT – Schutzeinheit; KU1, KU2 – Beschleunigungsschütze; KL – Linearschütz: R – Leistungsschalter.
Reis. 3. Thyristor-Spannungsregler PCT
Die Empfindlichkeit des Strompräsenzsystems beträgt 5-10 A Effektivstrom in der Phase. Der Regler bietet außerdem Schutz: Null, vor Schaltüberspannungen, vor Stromverlust in mindestens einer der Phasen (blockiert IT und MT), vor Störungen des Funkempfangs.Hochgeschwindigkeitssicherungen vom Typ PNB 5M bieten Schutz vor Kurzschlussströmen.