Frequenzregelung eines Asynchronmotors
Derzeit ist die Frequenzregelung der Drehwinkelgeschwindigkeit eines Elektroantriebs mit einem Asynchronmotor weit verbreitet, da sie es ermöglicht, die Drehgeschwindigkeit des Rotors in einem weiten Bereich sowohl über als auch unter dem Nennwert stufenlos zu ändern.
Frequenzumrichter sind moderne High-Tech-Geräte mit großem Einstellbereich und umfangreichen Funktionen zur Steuerung von Asynchronmotoren. Höchste Qualität und Zuverlässigkeit ermöglichen den Einsatz in verschiedenen Branchen zur Steuerung von Antrieben von Pumpen, Lüftern, Förderbändern usw.

Frequenzumrichter für die Versorgungsspannung werden in einphasige und dreiphasige, konstruktionsbedingt jedoch in rotierende und statische elektrische Maschinen unterteilt. Bei Elektromaschinenumrichtern wird die variable Frequenz durch den Einsatz konventioneller oder spezieller Elektromaschinen erreicht. V statische Frequenzumrichter Die Änderung der Frequenz des Versorgungsstroms wird durch die Verwendung elektrischer Elemente erreicht, die keine Bewegung haben.
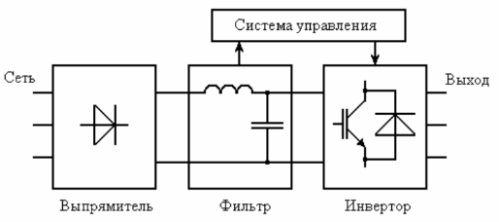
Frequenzumrichterschaltung eines Induktionsmotors
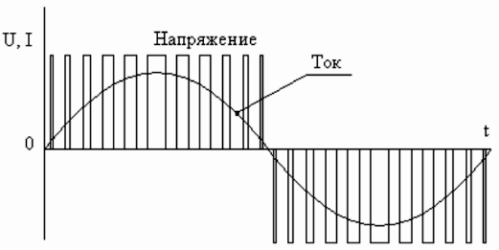
Ausgangssignal des Frequenzumrichters
Frequenzumrichter für einphasige Netze können Produktionsanlagen mit einer Leistung von bis zu 7,5 kW elektrisch antreiben. Ein Merkmal des Designs moderner Einphasenwandler besteht darin, dass am Eingang eine Phase mit einer Spannung von 220 V und am Ausgang drei Phasen mit dem gleichen Spannungswert vorhanden sind, was den Anschluss von dreiphasigen Elektromotoren an a ermöglicht Gerät ohne Verwendung von Kondensatoren.
Frequenzumrichter, die über ein 380-V-Drehstromnetz betrieben werden, sind im Leistungsbereich von 0,75 bis 630 kW erhältlich. Je nach Leistungswert werden Geräte in Polymer-Kombinations- und Metallgehäusen hergestellt.
Die beliebteste Steuerungsstrategie für Induktionsmotoren ist die Vektorsteuerung. Derzeit implementieren die meisten Frequenzumrichter eine Vektorsteuerung oder sogar eine sensorlose Vektorsteuerung (dieser Trend ist bei Frequenzumrichtern zu beobachten, die ursprünglich eine Skalarsteuerung implementierten und keine Anschlüsse zum Anschluss eines Geschwindigkeitssensors hatten).
Abhängig von der Art der Ausgangslast werden Frequenzumrichter nach der Art der Implementierung unterteilt:
-
für Pumpen- und Lüfterantriebe;
-
für allgemeine industrielle Elektroantriebe;
-
Funktioniert als Teil von Elektromotoren, die mit Überlastung betrieben werden.

Mechanische Eigenschaften typischer Belastungen
Moderne Frequenzumrichter verfügen über vielfältige Funktionsmerkmale, beispielsweise über eine manuelle und automatische Steuerung der Drehzahl und Drehrichtung des Motors eingebautes Potentiometer auf dem Bedienfeld.Ausgestattet mit der Möglichkeit, den Ausgangsfrequenzbereich von 0 bis 800 Hz anzupassen.
Umrichter sind in der Lage, einen Asynchronmotor anhand von Signalen von Peripheriesensoren automatisch zu steuern und einen Elektroantrieb gemäß einem vorgegebenen Timing-Algorithmus anzutreiben. Unterstützt automatische Wiederherstellungsfunktionen bei kurzfristigem Stromausfall. Führen Sie eine transiente Steuerung über eine Remote-Konsole durch und schützen Sie Elektromotoren vor Überlastung.

Der Zusammenhang zwischen der Drehwinkelgeschwindigkeit und der Frequenz des Versorgungsstroms ergibt sich aus Gl
ωo = 2πe1/ p
Bei konstanter Versorgungsspannung U1 und einer Frequenzänderung ändert sich der magnetische Fluss des Induktionsmotors. Gleichzeitig ist es zur besseren Nutzung des Magnetsystems bei einer Verringerung der Stromversorgungsfrequenz erforderlich, die Spannung proportional zu reduzieren, da sonst der Magnetisierungsstrom und die Verluste im Stahl deutlich ansteigen.
Ebenso muss bei steigender Versorgungsfrequenz die Spannung proportional ansteigen, um den magnetischen Fluss konstant zu halten, da dies sonst (bei konstantem Wellendrehmoment) zu einem Anstieg des Rotorstroms, einer Überlastung seiner Wicklungen durch Strom und einer Verringerung des maximalen Drehmoments führt.
Das rationale Spannungsregelgesetz hängt von der Art des Widerstandsmoments ab.
Bei einem konstanten statischen Belastungsmoment (Ms = const) muss die Spannung proportional zu ihrer Frequenz U1 / f1 = const geregelt werden. Für die Art der Lüfterlast ergibt sich für das Verhältnis die Form U1 / f21 = const.
Bei Lastmoment umgekehrt proportional zur Drehzahl U1 /√f1 = const.
Die folgenden Abbildungen zeigen ein vereinfachtes Anschlussdiagramm und mechanische Eigenschaften eines Induktionsmotors mit Frequenzsteuerung der Winkelgeschwindigkeit.
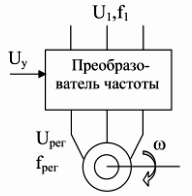
Anschlussplan eines Frequenzumrichters an einen Asynchronmotor
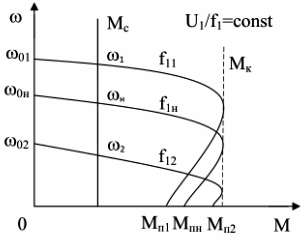
Kennwerte für eine Last mit konstantem statischen Widerstandsmoment
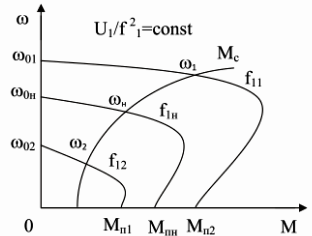
NSFunktionen zum Laden des Lüfters
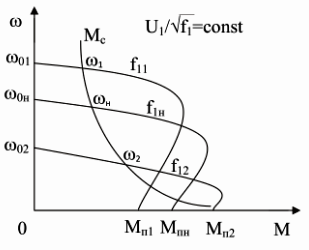
Eigenschaften unter statischer Last: Drehmoment umgekehrt proportional zur Drehwinkelgeschwindigkeit
Durch die Frequenzregelung der Drehzahl eines Asynchronmotors können Sie die Drehwinkelgeschwindigkeit im Bereich von 20 … 30 zu 1 ändern. Die Regelung der Drehzahl eines Asynchronmotors vom Hauptmotor nach unten erfolgt praktisch auf Null.
Wenn sich die Frequenz des Versorgungsnetzes ändert, hängt die Obergrenze der Drehzahl eines Asynchronmotors von seinen mechanischen Eigenschaften ab, insbesondere da der Asynchronmotor bei Frequenzen oberhalb der Nennfrequenz mit besseren Energieeigenschaften arbeitet als bei niedrigeren Frequenzen. Wenn daher im Antriebssystem ein Getriebe verwendet wird, muss diese Frequenzregelung des Motors nicht nur nach unten, sondern auch nach oben vom Nennpunkt bis zur maximal zulässigen Drehzahl unter den Bedingungen der mechanischen Festigkeit erfolgen Der Rotor.
Wenn die Motordrehzahl über den im Pass angegebenen Wert steigt, darf die Frequenz der Stromquelle die Nennfrequenz nicht um nicht mehr als das 1,5- bis 2-fache überschreiten.
Für die Regelung eines Käfigläufer-Induktionsmotors ist das Frequenzverfahren am vielversprechendsten. Die Leistungsverluste bei einer solchen Regelung sind gering, da sie nicht mit einer Erhöhung einhergehen rutschen… Die resultierenden mechanischen Eigenschaften sind sehr steif.