Bremselektromagnete für Kräne
 Bremselektromagnete zur Steuerung mechanischer Bremsen. Diese Bremsen wiederum dienen dazu, die Kranmechanismen in einer bestimmten Position anzuhalten oder den Bremsweg im Falle einer Leckage bei ausgeschaltetem Antriebsmotor zu begrenzen.
Bremselektromagnete zur Steuerung mechanischer Bremsen. Diese Bremsen wiederum dienen dazu, die Kranmechanismen in einer bestimmten Position anzuhalten oder den Bremsweg im Falle einer Leckage bei ausgeschaltetem Antriebsmotor zu begrenzen.
Backen- und Bandbremsen werden am häufigsten für Kranmechanismen verwendet (bei Bedarf haben sie Bremsmomente über 10 kN NS·m) – Feder- und manchmal auch Lastbremsen. Seltener werden Scheibenbremsen (Bremsmoment bis 1 kN x m) und konische (Bremsmoment bis 50 N NS m) verwendet.
Die Spulen der Bremselektromagnete schalten sich gleichzeitig mit dem Elektromotor ein und lösen die Bremse. Beim Ausschalten des Elektromotors werden gleichzeitig die Spulen des Bremsmagnetventils entlüftet und es kommt zu einer Bremsung – die Bremse wird unter der Wirkung einer Feder oder Last angezogen.
Bremselektromagnete mit Wechselstrom werden für Bremsen von Kranmechanismen verwendet: dreiphasige KMT-Serie (Abb. 1) mit langem Hub (maximaler Ankerhub von 50 bis 80 mm), einphasige MO-Serie (Abb.2)-Kurzhub (Bremsstangenhub von 3 bis 4 mm), Gleichstrom: KMP- und VM-Serie – Langhub (Ankerhub von 40 bis 120 mm), MP-Serie (Abb. 3) – Kurzhub (Ankerhub). von 3 bis 4,5 mm).
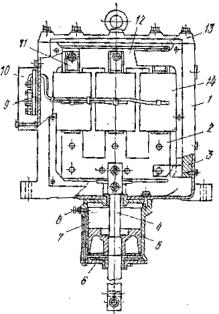
Reis. 1. Bremselektromagnet der KMT-Serie: 1 – Gehäuse, 2 – Anker, 3 – Führungen, 4 – Stange, 5 – Kolben, 6 ~ Dämpferabdeckung, 7 – Dämpferzylinder, 8 – Druckstufen-Einstellschraube, 9 – Klemmenblock, 10 – Klemmenblockabdeckung, 11 – Spulenhalter aus Messing, 12 – Joch, 13 – Abdeckung, 14 – Spule
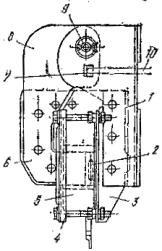
Reis. 2. Bremselektromagnet der MO-Serie: 1 – festes Joch, 2 – Kurzschluss, 3 – quadratisch, 4 – Abdeckung, 5 – Spule, .6 – Anker, 7 – Streifen, 8 – Wange, 9 – Achse, 10 – Schub
Die Hauptparameter von Bremselektromagneten mit translatorisch bewegtem Anker (KMT, KMP, VM und MP) sind die Zugkraft und der Ankerhub, bei Ventilelektromagneten der MO-Serie das Elektromagnetmoment und der Ankerdrehwinkel.
Die Bremsmagnete aller oben genannten Serien sind unabhängig Elektrogerätegelenkig mit Bremsen.
Backenbremsen der TS-Serie mit Kurzhub-Elektromagnete und TKP-Federbremsboote (siehe Abb. 3) mit eingebauten Gleichstromspulen. Bei diesen Bremsen wird Hebel 1 zusammen mit dem Magnetgehäuse und der Magnetanker mit dem Hebel gegossen.
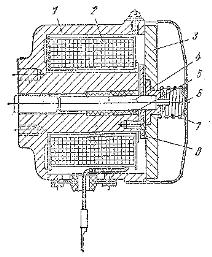
Reis. 3. Bremselektromagnet der MP-Serie: 1 – Körper, 2 – Spule, 3 – Anker, 4 – Stift, 5 – diese Otolithen und Buchsen, 6 – Abdeckung, 7 – Dämpfungsfeder, 8 – Pol
Die Spulen der AC-Bremsmagnete sind parallel geschaltet und für die volle Netzspannung ausgelegt. Beim Einschalten entsteht ein erheblicher Stromschlag: für Elektromagnete der KMT-Serie Azstart = (10-30) Aznumer, Serie MO — Azstart = (5-6) AzNo.
Bei der Auswahl von Schutzeinrichtungen wie Sicherungen muss der Einschaltstrom berücksichtigt werden. Der Anlaufstrom wird durch die Formeln bestimmt
Azstart = Cp / √3U
für dreiphasige Elektromagnete
Istart = Sp / U
wobei CNS – volle Leistung zum Zeitpunkt des Starts, VA, Netzspannung, V.
Bremsmagnetspulen mit Gleichstrom können in Reihe und parallel geschaltet (Erregung) sein.
 Elektromagnete aus der Reihenschaltung der Spule sind aufgrund der geringen Induktivität schnell reagierend und zuverlässig im Betrieb, da sie für die Bremsung, den Mechanismus für Schaukeln im Ankerkreis des Elektromotors, sorgen. Ihr Nachteil ist die Möglichkeit einer Fehlbremsung mit anschließender Enthemmung bei sehr geringer Last, beispielsweise im Leerlauf. Daher empfiehlt sich der Einsatz bei Kranmechanismen mit relativ geringen Schwankungen der Last und damit der Größe des Ankerstroms, beispielsweise bei Kranbewegungsmechanismen.
Elektromagnete aus der Reihenschaltung der Spule sind aufgrund der geringen Induktivität schnell reagierend und zuverlässig im Betrieb, da sie für die Bremsung, den Mechanismus für Schaukeln im Ankerkreis des Elektromotors, sorgen. Ihr Nachteil ist die Möglichkeit einer Fehlbremsung mit anschließender Enthemmung bei sehr geringer Last, beispielsweise im Leerlauf. Daher empfiehlt sich der Einsatz bei Kranmechanismen mit relativ geringen Schwankungen der Last und damit der Größe des Ankerstroms, beispielsweise bei Kranbewegungsmechanismen.
Die Stromwerte für die Hebemechanismen betragen etwa 40 % des Nennstroms des Elektromotors und für die Fahrmechanismen etwa 60 %. Daher wird die Größe der Zugkraft bzw. des Drehmoments der Spulenbremsen durchgehend angegeben die Kataloge für zwei Werte des Spulenstroms: für 40 und 60 % des Nennwerts (jeweils für Hebe- und Bewegungsmechanismen).
Wenn beim Starten des Elektromotors der Mindestwert des durch die Spule des Bremselektromagneten fließenden Stroms weniger als 40 oder 60 % des Nennwerts beträgt, muss das Bremsmoment auf die Werte reduziert werden angezeigt, wenn der aktuelle Wert 40 oder 60 % vom Nennwert abweicht (durch Reduzierung der Bremsfederkraft oder des Bremsgewichts).
 Gleichstrombremselektromagnete mit parallel geschalteten Spulen weisen die oben genannten Nachteile nicht auf. Aufgrund der erheblichen Induktivität der Spulen sind diese Elektromagnete jedoch träge. Darüber hinaus sind sie weniger zuverlässig, da bei einer Unterbrechung des Ankerkreises des Elektromotors die Wicklungen dieser Elektromagnete weiterhin vom Strom durchflossen werden und die Bremse ohne Bremse bleibt.
Gleichstrombremselektromagnete mit parallel geschalteten Spulen weisen die oben genannten Nachteile nicht auf. Aufgrund der erheblichen Induktivität der Spulen sind diese Elektromagnete jedoch träge. Darüber hinaus sind sie weniger zuverlässig, da bei einer Unterbrechung des Ankerkreises des Elektromotors die Wicklungen dieser Elektromagnete weiterhin vom Strom durchflossen werden und die Bremse ohne Bremse bleibt.
Der erste Nachteil kann durch eine Zwangsschaltung behoben werden, bei der in Reihe mit der Spule ein Wirtschaftswiderstand eingebaut ist, der beim Einfahren des elektromagnetischen Ankers das Stromrelais mit den Öffnungskontakten manövriert und nach dem elektromagnetischen Anker in den Stromkreis eintritt entzogen, wodurch der Strom in der Spule und deren Erwärmung entsprechend reduziert werden.
Der zweite Nachteil wird beseitigt, indem die Spule des Stromrelais in Reihe mit dem Anker des Elektromotors geschaltet und in Reihe mit dem Spulenkreis des Elektromagneten geschlossen wird. Beim Forcen sollte die Force-Zeit nicht mehr als 0,3 – 0,6 s betragen.
Um Elektromagnete mit Gleichstrom aus einem Wechselstromnetz zu versorgen, werden Standard-Einweggleichrichter mit Dioden für einen Strom von bis zu 3 A und eine Gruppe von Kondensatoren mit einer Kapazität von 2 bis 14 μF verwendet, die entsprechende Ausgangsparameter liefert die Bedingungen für die Versorgungswicklungen von Elektromagneten.
Elektromagnete mit Wechselstrombremsung werden häufig für Krananlagen verwendet, aber die Praxis ihrer Arbeit hat gezeigt, dass sie eine Reihe von Nachteilen haben: relativ geringe Verschleißfestigkeit, erhebliche Spulenschaltströme, die 7 bis 30 Mal höher sind als ihre Nennströme (bei vollständig eingefahrenen Ankern). ), starke Stöße beim Bremsen und Lösen aufgrund mangelnder Regulierung der Sanftheit des Bremsvorgangs, Beschädigung der Spulen durch Überhitzung bei unvollständigem Einfahren des Ankers.
 Ein gemeinsamer Nachteil von DC- und AC-Bremselektromagneten ist die Unvollkommenheit der Traktionseigenschaften: Zu Beginn des Ankerhubs entwickeln sie die geringste Traktionskraft und am Ende die größte.
Ein gemeinsamer Nachteil von DC- und AC-Bremselektromagneten ist die Unvollkommenheit der Traktionseigenschaften: Zu Beginn des Ankerhubs entwickeln sie die geringste Traktionskraft und am Ende die größte.
Trotz all dieser Nachteile sind DC-Bremselektromagnete zuverlässiger im Betrieb als AC-Elektromagnete. Um die Bremsen von Kranmechanismen mit Wechselstromgeräten zu steuern, werden daher häufig Gleichstrombremselektromagnete ausprobiert, die von Halbleitergleichrichtern gespeist werden.
Da Bremselektromagnete eine Reihe der oben genannten erheblichen Nachteile aufweisen, werden sie derzeit häufig zum Antrieb von Kranbremsen eingesetzt. Elektrohydraulische Langhub-Triebwerke.