Elektrischer Katzantrieb mit Laufkränen
Eine Laufkatze mit Laufkran ist ein eigenständiges Element einer Hebevorrichtung und dient dazu, Lasten im Bereich des Laufkrans mit einer technologisch bedingten Bewegungsgeschwindigkeit und der notwendigen Genauigkeit der Lastpositionierung zu bewegen. Der Drehgestellantrieb ist eine der Hauptkomponenten der Laufkranausrüstung.
Die Laufkatze bewegt sich auf der Schiene eines Laufkrans. Die Brücke selbst bewegt sich in einer Richtung senkrecht zur Bewegungsrichtung des Wagens. Am Wagen ist ein Hebemechanismus installiert, der mit einem Haken (oder Elektromagneten) ausgestattet ist, mit dem Sie die Last bewegen können. Die Bewegung des Drehgestells ist ein integraler Bestandteil des technologischen Zyklus des Brückenkrans (Abb. 1).
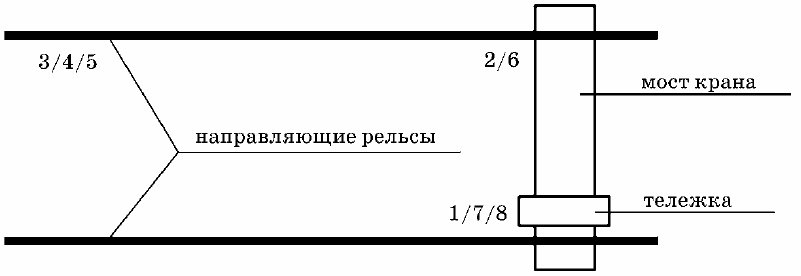
Reis. 1. Schema zur Durchführung von Arbeiten mit einem Brückenkran im Arbeitszyklus
Dieser Zyklus besteht aus den folgenden Vorgängen (in Abbildung 1 sind die Vorgangsnummern in Zahlen dargestellt):
1 – Heben der Last;
2 – Bewegen des Wagens an eine bestimmte Position;
3 – Bewegen des Krans in eine vorgegebene Position;
4 – Verringerung des Gewichts der Last;
5 – Anheben des Hakens mit dem Gewicht der Last;
6 – Bewegen des Krans in seine ursprüngliche Position;
7 – Bewegen des Wagens in seine ursprüngliche Position;
8 – Absenken des Hakens.
Wie aus dem Prozesszyklus des Brückenkrans ersichtlich ist, wird der Katzantriebsmotor im zweiten und siebten Arbeitsgang eingeschaltet. Nähert sich das Drehgestell einer vorgegebenen Position im Abstand des Laufkrans, wird der Elektromotor des Drehgestellantriebs elektrisch abgebremst, um die erforderliche Bremsgenauigkeit sicherzustellen.
Anschließend wird der Motor abgestellt und eine mechanische Bremse betätigt. Zusätzlich wird der elektrische Antrieb der Brückenbewegung eingeschaltet und die Last bewegt sich entsprechend der technologischen Aufgabe durch die Werkstatt. Am vorgesehenen Ort angekommen, stoppt der Kran, die Last wird abgesenkt und anschließend werden die notwendigen technologischen Arbeiten durchgeführt.

Das kinematische Diagramm des Laufkatzenbewegungsmechanismus bei Laufkranen ist in Abbildung 2 dargestellt. Der Laufkatzenbewegungsmechanismus ist nach dem Schema mit einem Getriebe in der Mitte zwischen den Antriebsrädern ausgeführt.
Der Antrieb vom Elektromotor D über die Bremsscheibe T, das Getriebe P, die Kupplungen M und die Wellen B wird auf die Laufräder übertragen. Um den Wagen im Stillstand zu halten, wird eine Bremsrolle verwendet.
Der Wagen verfügt über vier Fahrräder und zwei Antriebsräder. Die Laufräder von Krankatzen sind in der Regel zweirippig ausgeführt.
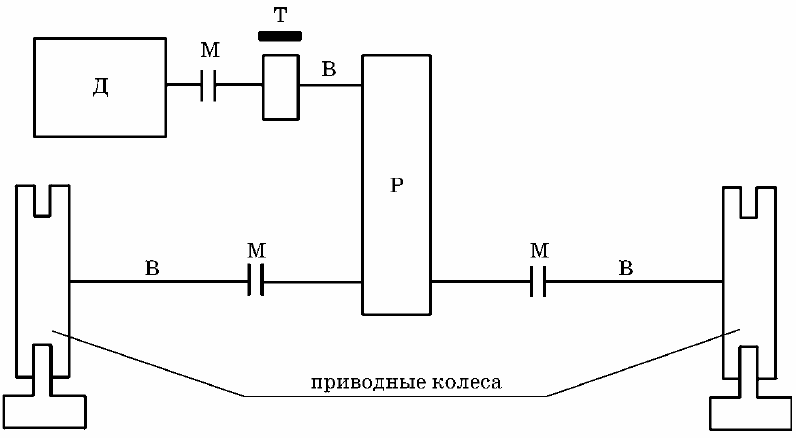
Reis. 2. Kinematisches Diagramm des Trolley-Bewegungsmechanismus
Die Zeit zum Bewegen des Wagens an die angegebene Position wird unter Berücksichtigung der Zeit zum Beschleunigen und Abbremsen des Wagens mit der erforderlichen Beschleunigung bestimmt.Basierend auf den Bedingungen des technologischen Prozesses sollte das Tachogramm beim Bewegen des Wagens die in Abbildung 3 gezeigte Form haben.
Es ist notwendig, einen sanften Start des Drehgestellmechanismus auf eine bestimmte Geschwindigkeit mit der erforderlichen Beschleunigung sicherzustellen. Um die erforderliche Positioniergenauigkeit sicherzustellen, ist ein sanftes Abbremsen des Elektroantriebs mit Übergang in eine reduzierte Geschwindigkeit erforderlich, wonach die Katze stoppt.
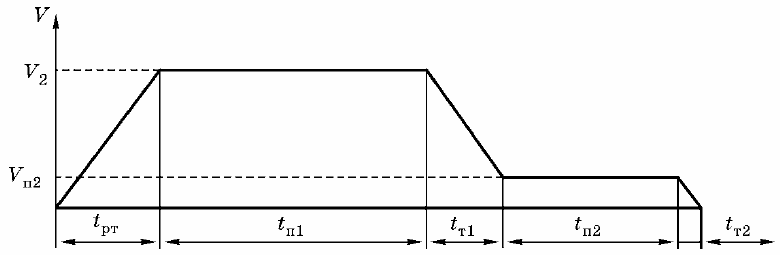
Reis. 3. Tachogramm des Trolley-Bewegungsmechanismus
Die Bewegung des Drehgestells mit Stößen auf die Metallstruktur in den Schienenstößen, starke Beschleunigung und Verzögerung sowie natürliche Vibrationen der Metallstruktur bei Belastung der Maschinen verursachen sehr starke mechanische Einwirkungen auf die elektrischen Geräte am Drehgestell des Brückenkrans. Basierend darauf muss der elektrische Antrieb zum Bewegen des Wagens folgende Anforderungen erfüllen:
1) Der elektrische Antrieb muss die Möglichkeit bieten, den Mechanismus in Bewegung zu setzen, die Bewegungsrichtung umzukehren und den Mechanismus mit der erforderlichen Beschleunigung (m / s2) und der richtigen Positionierungsgenauigkeit (mm) zu stoppen.
2) Der Elektroantrieb muss eine reibungslose Geschwindigkeitsregelung vom Hauptstrom aus ermöglichen.
3) das entwickelte Motordrehmoment muss den Betrieb des Mechanismus mit einer bestimmten Intensität gewährleisten;
4) Bei einer bestimmten Anzahl von Motorstarts pro Stunde sollte es zu keiner Überhitzung der Wicklungen kommen, wodurch ein längerer Stillstand des Mechanismus möglich ist;
5) Der Motor muss entsprechend den Betriebsbedingungen ausgewählt werden, d. h. er muss eine geeignete Konstruktion haben und seine Wicklungen müssen hitzebeständig und gegen Feuchtigkeit isoliert sein;
6) Der Antriebsmotor muss über die kleinsten Schwungmassen verfügen, die einen erheblichen Einfluss auf den Übergang von Transienten bei häufigen Antriebsstarts haben.
7) Der Antriebsmotor muss der Leistung des Fahrwerks entsprechen und über die erforderliche Überlastfähigkeit verfügen;
8) Der elektrische Antrieb muss die Bildung transienter Prozesse mit minimaler Dauer gewährleisten;
9) Sicherheit und Wartungsfreundlichkeit müssen bei der Auslegung des Elektroantriebs berücksichtigt werden.

Das statische Moment für Bewegungsmechanismen, die auf einer horizontalen Gleisstrecke in einer Produktionsanlage arbeiten, wird durch Gleitreibungskräfte in den Lagern und Rollreibung der auf den Schienen des Laufkrans rollenden Drehgestellräder erzeugt. Das statische Moment des Mechanismus während der Vorwärtsbewegung der Katze wird durch die Tragfähigkeit des Krans bestimmt. Das statische Moment des Mechanismus während der Rückwärtsbewegung des Drehgestells wird für eine unvollständige Belastung berechnet.
Für den elektrischen Antrieb der Laufkatze von Laufkranen werden asynchrone Käfigläufermotoren (inkl als Teil eines Frequenzumrichters), Induktionsmotoren mit gewickeltem Rotor und unabhängig erregte Gleichstrommotoren.