Steuerkreise für elektrische Antriebe
 Abhängig von der Geschwindigkeit von Personenaufzügen werden folgende Arten von Stromregelkreisen eingesetzt:
Abhängig von der Geschwindigkeit von Personenaufzügen werden folgende Arten von Stromregelkreisen eingesetzt:
-
Niedriggeschwindigkeitsaufzüge verfügen über Käfigläufer- oder Phasenrotormotoren und eine Knopf- oder Hebelsteuerung.
-
Hochgeschwindigkeitsaufzüge – Motoren mit zwei oder einer Geschwindigkeit, gesteuert durch Magnetstationen oder Thyristor-Steuerstationen (TSU-R) mit Steuerknöpfen,
-
Hochgeschwindigkeits- und Hochgeschwindigkeitsaufzüge – Gleichstrommotoren, gesteuert durch das System „Generator – Motor“ mit unterschiedlichen Erregungsschemata oder durch das System „Thyristorwandler – Motor“ mit Tasten,
-
Es können auch Ketten asynchroner Ventilkaskaden (AVK) eingesetzt werden, deren Einsatz eine Effizienzsteigerung ermöglicht. Installation.
Personenaufzüge werden je nach Personenstrom, Hubhöhe und Anzahl der Personenaufzüge in Einzel- und Gruppensteuerung unterteilt.
Zu den Singles gehören:
a) Aufzüge, die nach Einzelbefehlen und Rufen ohne Kreuzung von Haltestellen während des Abstiegs und Aufstiegs von Fahrgästen betrieben werden,
b) Aufzüge mit Zustieg der Fahrgäste beim Hinunterfahren, jedoch mit Rufverbot beim Hinauffahren,
c) das Gleiche, jedoch mit Registrierung der Anrufe beim Abstieg und deren anschließender Ausführung.
Zu den gruppenbetriebenen Aufzügen gehören:
a) Aufzüge mit einer Taste zum Rufen der Landeplätze, unabhängig von der Anzahl der installierten Aufzüge (doppelte Steuerung wird häufiger verwendet) und mit Passagierzustieg beim Abstieg,
b) das Gleiche, jedoch mit vollständiger Sammlung der Passagiere in den Zwischengeschossen zum Ein- und Aussteigen (normalerweise in Verwaltungs-, Bildungs- und anderen Gebäuden installiert).
Darüber hinaus kommt es häufig vor, dass Aufzüge zu mehreren Häusern und ganzen Stadtvierteln geschickt werden, wenn der Zustand der Stromkreise von einer Leitstelle aus überwacht und mehrere Aufzüge gesteuert werden.
Unabhängig von der Geschwindigkeit der Aufzüge, ihrer Einzel- oder Gruppensteuerung, sind die notwendigen Elemente der meisten ihrer Systeme wie folgt:
-
selbsteinstellende Knöpfe, Klebe- oder Schließknöpfe zum Rufen von Taxis und zum Erteilen von Befehlen aus dem Taxi,
-
verschiedene Auswahlsensoren und präzise Stopp-Anpassungsgeräte zur Registrierung der Position der Kabine und des Zustands der Stromkreise,
-
Sensoren und Verriegelungen für den Zustand der Förderseile, den Zustand der Minen- und Kabinentüren (offen oder geschlossen),
-
Endschalter zur Begrenzung der Geschwindigkeit und der Kabinenbelastung,
-
Indikatoren für die Bewegungsrichtung der Kabine und bei einigen Aufzügen das Vorhandensein einer Last in der Kabine.
Von diesen Punkten werden wir uns detaillierter mit Positionsanpassungsgeräten (Position Matching Devices, PSCs) befassen, die den Ort bestimmen, an dem der Minenwagen anhalten muss, wenn ein Anruf oder Befehl erfolgt, und seine Bewegung nach oben oder unten.Bei den übrigen Artikeln handelt es sich in der Regel um verschiedene Modifikationen von Endschaltern, die aus anderen Kursen bekannt sind.
Strukturell werden Positionsanpassungsgeräte in Form eines Satzes elektromechanischer oder induktiver oder magnetischer (Reed-)Sensoren mit drei Positionen in Minen implementiert, wobei die Signale an ein Relais oder einen berührungslosen Wähler im Maschinenraum ausgegeben werden (manchmal werden CCPs implementiert). in Form zentraler Bodeneinheiten im Maschinenraum) …
Die im Bergwerk befindlichen Sensoren interagieren mit den in der Kabine montierten Abzweigungen (für elektromechanische) oder magnetischen Shunts (für induktive oder Reed-Schalter) und senden Signale an die im Maschinenraum installierte zentrale Bodeneinheit (Schrittkopierer oder Relaisrelais) und die Letzterer sendet und eine Steuerschaltung – ein Signal zur Ausführung des empfangenen Befehls.
Zweckmäßiger ist es, die Sensoren für die Signale der Wagenbewegung oben oder unten am Wagen zu platzieren (es werden weniger Drähte benötigt) und an den erforderlichen Stellen magnetische Shunts in den Minen zu installieren. In diesem Fall entspricht bei digitaler Steuerung die Anzahl der Spalten mit installierten Shunts entlang des Schachts der Anzahl der Bits der übertragenen Etagennummer im Binär- oder anderen Code.
Elektromechanische Schalter mit drei Positionen werden durch eine Lockenanordnung in eine der Positionen bewegt, die der Auf- oder Abbewegung des Fahrerhauses oder seinem Stopp entspricht.In diesem Fall werden bei fahrender Kabine die Kontakte der Schalter in den durchfahrenen Stockwerken in eine der Endpositionen geschaltet, um die Aktion der Ruf- und Befehlskette vorzubereiten, und wenn die Kabine anhält, wird der Schalter eingeschaltet Wird in die Mittelstellung gefahren, schaltet den Steuerkreis der Richtungsschütze ab und verhindert so, dass die Kabine die Etage verlässt, wenn versehentlich die Befehls- oder Ruftaste gedrückt wird.
Um ein relativ genaues Abbremsen der Aufzugskabine zu gewährleisten, werden in deren Steuerkreisen seit kurzem berührungslose induktive oder kontaktabgedichtete magnetisch gesteuerte (Reed-)Sensoren eingesetzt. Diese Sensoren sind sowohl im Bergwerk als auch in der Kabine installiert: Im Bergwerk gibt es Sensoren zur Auswahl (Verzögerung) und in der Kabine gibt es einen Sensor zum präzisen Stoppen. Zur Verbindung mit den Sensoren ist im Cockpit ein magnetischer selektiver Laternen-Shunt und im Schacht (auf jeder Etage) ferromagnetische Präzisionsstopp-Shunts angebracht.
Induktive Sensoren bestehen aus einem offenen U-förmigen Magnetkreis mit einer in einem Gehäuse eingeschlossenen Spule. Die Wicklung des Führungsrelais ist mit dieser in Reihe geschaltet und wird mit einer Wechselspannung (U) beaufschlagt.
Bei einem offenen Magnetkreis ist der magnetische Fluss durch die Spule gering. Daher die e.m.f. und der Selbstinduktionsstrom in den Spulendrähten sowie der dadurch verursachte induktive Widerstand (X) fehlen praktisch, sodass der Widerstand der Spule aktiv ist (R). Der Strom in in Reihe geschalteten Spulen ist relativ groß; ahmt das Schließen der Kontakte im Kontaktsystem nach (das Relais schaltet ein).
Wenn der Shunt den U-förmigen Magnetkreis schließt, erhöht sich der Magnetfluss durch seine Spule und damit die EMK. Selbstinduktivität sowie der dadurch bedingte induktive Widerstand der Spule. Dadurch sinkt der Strom in den in Reihe geschalteten Spulen, was das Öffnen des Stromkreises im Kontaktsystem vortäuscht (das Führungsrelais wird ausgeschaltet).
Der Reed-Schalter ist ein U-förmiger Körper, in dem auf einer Seite der Nut zwei versiegelte Glaskolben mit Vakuum im Inneren und auf Federplatten befestigten Kontakten platziert sind, die mit den jeweiligen Steuerkreisen des Aufzugs verbunden sind. Auf der anderen Seite des Schlitzes befindet sich ein Permanentmagnet. Das Arbeitselement solcher Sensoren ist ein ferromagnetischer Shunt, der bei Bewegung der Aufzugskabine durch den U-förmigen Schnitt verläuft.
Das Funktionsprinzip dieser Sensoren ist wie folgt: Die Federkräfte der Kontaktplatten der Reed-Schalter sind so gerichtet, dass, wenn das Feld eines Permanentmagneten nicht auf sie einwirkt, die Schließerkontakte geöffnet sind und die Schließerkontakte geöffnet sind geschlossene Kontakte sind geschlossen, d.h. Die Stromkreise, mit denen diese Kontakte verbunden sind, werden geöffnet oder geschlossen.
Dieser Reed-Schalterzustand liegt vor, wenn sich der ferromagnetische Shunt in der Nut eines U-förmigen Körpers befindet, da die magnetischen Feldlinien des Permanentmagneten über den Shunt geschlossen sind. Sobald der Shunt die Nut verlässt, werden die magnetischen Feldlinien über den Shunt geschlossen Die Platten überwinden ihre Federwirkung und die Reed-Schalterkontakte und damit die Stromkreise, an die sie angeschlossen sind, gehen in den entgegengesetzten Zustand über.

Betrachten Sie als Beispiel, das die Hauptmerkmale von Aufzugssteuerungssystemen widerspiegelt, das in Abb. gezeigte Steuerungsschema für einen einzelnen Aufzug ohne zugehörige Haltestellen. 1. Der Aufzug bedient vier Etagen; Als Leitmotor wird ein zweitouriger Asynchronmotor M verwendet.
Die Aufnahme niedriger (Ml) oder hoher (B) Motorumdrehungen erfolgt durch die entsprechenden Schütze Ml und B. Die Drehrichtung des Motors wird durch die Schütze B und H bestimmt, die Verzögerung – durch einen zusätzlichen Widerstand P, das Anhalten – durch elektromagnetische Bremse ET.
Wird als Etagenschalter verwendet berührungslose induktive Sensoren (DTS, DTOV und DTON) in Reihe mit den Relaisspulen (RIS, RITOV, RITON) geschaltet. Die TTP-Sensoren werden verwendet, um den Aufzugsantrieb auf Hochgeschwindigkeit zu bringen und einen Impuls zum Verlangsamen zu geben, während die DTOV- und DTON-Sensoren dafür ausgelegt sind, den Aufzug präzise auf dem Bodenniveau der entsprechenden Etage anzuhalten und an der Kabine angebracht sind. Für sie sind magnetische Shunts im Schacht des Schachts eingebaut.
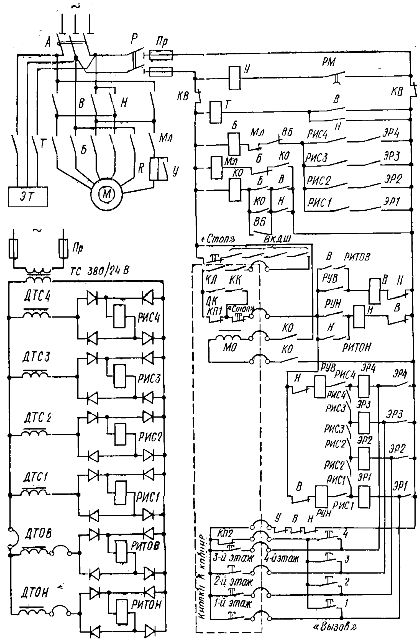
Reis. 1. Schematische Darstellung einer einzelnen Aufzugssteuerung
Betrachten wir den Zweck der übrigen Elemente der Schaltung und ihre Funktionsweise am Beispiel der Bewegung einer Kabine mit einem Passagier vom 1. in den 3. Stock unter der Annahme, dass der Automat A, der Trennschalter P und die Endschalter KB die begrenzen Auf- und Abbewegung der Kabine im Notbetrieb sind geschlossen und die Kabine befindet sich im Erdgeschoss. In diesem Fall fließen die Spulen des RIS-Relais zusätzlich zum Relais der ersten Etage vom Nennstrom.
Beim Drücken der Taste „3. Stock“ wird folgender Stromkreis gebildet: Netzphase – Pol des Trennschalters P – Sicherung Pr – Endschalter KB – Taste „Stopp“ – Verriegelung der Grubentüren D1 – D4 – Kontakte zum Spannen das Seil KK – Sicherheitsendschalter KL – Kabinentürschalter DK – Kontakte der Taste „Stopp“ – Öffnungssperrkontakt Н – Relaisspule RUV – Schließkontakte der Relais RIS4 und RISZ (die Spulen dieser Relais führen Strom) – Spule des Etagenrelais ERZ – Taster „3. Etage“ – Öffnungsblöcke – Kontakte der Schütze U, B, N – Endschalter KB – Sicherung R – Trennpol P – Netzphase.
Nachdem die Relais RUV und ER3 betätigt wurden, werden das Vorwärtsfahrschütz B und das Schnellfahrschütz B (auf Spulenkreis B – Sperrkontakt ML – Hochgeschwindigkeitsschalter VB – Relaiskontakte RISZ und ER3) eingeschaltet. Wenn die Kontakte B und B geschlossen sind, ist der Motor mit dem Netz verbunden, das Schütz T, die Freigaberolle und das Nebenschlussschütz KO, das das Nebenschlusssolenoid MO einschaltet und den Stromkreis der Niedergeschwindigkeitsschützspule Ml vorbereitet, sind geöffnet eingeschaltet. Der Hub fährt zurück, der Verriegelungshebel wird freigegeben und die Kabine beginnt sich zu bewegen.
Wenn sich die Kabine dem dritten Stock nähert, schließt der ferromagnetische Shunt die Spule des TTSZ-Sensors, sein Widerstand erhöht sich und das RISZ-Relais verschwindet, wodurch die ER3- und RUV-Relais ausgeschaltet werden. Infolgedessen verschwindet Schütz B, schließt seinen Kontakt, schaltet den Niedergeschwindigkeitsschütz Ml ein und Schütz B bleibt eingeschaltet, da bei fahrendem Fahrzeug der Magnetkreis des präzisen Bremssensors noch nicht geschlossen ist RITOV-Kontakt noch nicht offen.Der Motor wird im Generatormodus mit niedriger Drehzahl gestoppt, indem in einer Phase des Stators ein Widerstand R eingebaut wird.
Sobald der Wagenboden mit dem Boden des Stockwerks ausgerichtet ist, schließt der magnetische Shunt den Magnetkreis der Spule des Genauhaltsensors DTOV, das Relais RITOV verschwindet und die Schütze B, dann KO und schließlich ML werden eingeschaltet Dadurch werden der Elektromagnet des Motors und die Bremse vom Netz getrennt, die mechanische Bremse betätigt und die Kabine angehalten.
Erlernen eines kollektiven Schemas zur Steuerung von Aufzügen mit vorbeifahrenden Haltestellen nur beim Absenken der Kabine oder eines vollständig kollektiven Schemas, d. h. Beim Vorbeifahren an Haltestellen während der Auf- und Abwärtsbewegung des Fahrzeugs ist ein ähnliches Schema wie in Abb. 1 erforderlich. 1. Führen Sie einige Ergänzungen ein. Beispielsweise sind in einem Motorkreis mit zwei Geschwindigkeiten die induktiven ID-Sensoren, das RIS-Relais und die Ruf- und Bestelltasten auf jeder Etage enthalten, wie in Abb. 2.
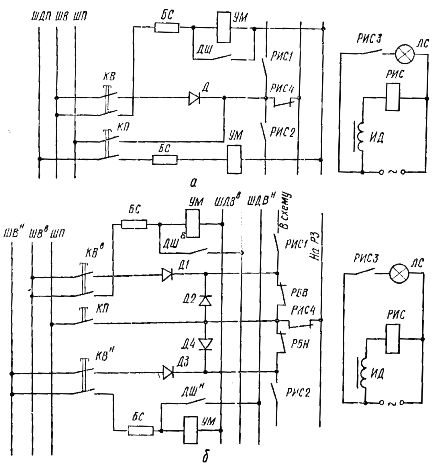
Reis. 2. Fragmente von Ergänzungen zu kollektiven Aufzugssteuerungssystemen (eine Etage)
In einem Schema mit vorbeifahrenden Stopps beim Absenken der Kabine (Abb. 2, a) werden Rufe und Befehle über separate Klebetasten gegeben und können daher jederzeit registriert und sofort an das Schema übermittelt werden, mit Ausnahme der Bewegungsdauer der Kabine Kabine mit Passagieren oben, wenn der Versorgungsbus der Transferkontakte Anrufe an den Exekutivstromkreis durch selektive Kontakte vom Plusbus abgeschaltet werden.
Im vollständigen selektiven Steuerungsschema (Abb. 2, b) gibt es zusätzlich Klingelkreise zum Einsteigen (ШДВв) und Absenken (ШДВн) der Kabinen, die Kontakte der Sperrrelais RBV und RBN sind mit den Kontakten des selektiven Abschnittskreis-Exekutivkreises verbunden .
In den Diagrammen in Abb. 1 und 2: Wenn sich keine Kabine auf dem Boden befindet, werden die Spulen des ID-Induktionssensors und das RIS-Relais mit Strom versorgt. Wenn Sie also den Befehlsbefehlsknopf drücken oder KV anrufen (sie werden von den UM-Haltemagneten im eingeschalteten Zustand gehalten, bis sie von den Kontakten der Minentüren auf dieser Etage des DSh überwunden werden), wird ein Stromkreis gebildet (nicht). (siehe Abbildungen), das das Aufwärtssteuerrelais RUV umfasst, wenn die Zielstockwerkhöhe höher als die Parkhausebene liegt, oder das Abwärtssteuerrelais LVL, wenn die Zielstockwerksebene unter der Parkplatzebene liegt.
Nach der Ankunft der Kabine in der Rufetage wird die ID des induktiven Sensors entlüftet, das RIS-Relais wird ausgeschaltet, wodurch seine Kontakte geöffnet werden, wodurch das RUV- oder RUN-Relais und die LS-Lampe ausgeschaltet werden (die Kabine stoppt) und Durch Schließen des RIS4-Kontakts wird ein Stromkreis für die Ausführung des vom Fahrzeug kommenden Befehls vorbereitet.
Im gesamten Sammelkreis wird der durch die Kontakte RIS1 und RIS2 auf dem Boden des Parkplatzes des Autos geteilte Stromkreis nicht nur durch diese Kontakte, sondern auch durch die Kontakte des Sperrrelais oben RBV oder unten RBN (deren Spulen) unterbrochen sind im Diagramm nicht dargestellt), und die Hebe-, Senk- und Ordnungskreise sind durch Trenndioden D1 – D4 voneinander getrennt.
Vor dem Betätigen der Ruf- oder Bestelltaste werden, wenn die Fahrtrichtung des Fahrzeugs noch nicht ausgewählt wurde, alle Kontakte im Richtungswahlkreis geschlossen, mit Ausnahme der RIS4-Kontakte auf der Parketage.Wenn daher eine dieser Tasten gedrückt wird, werden die Rufsignale von den Stockwerken, die über dem Stockwerk des Parkhauses liegen, mit der Relaisspule RUN verbunden, und die Rufsignale von den Stockwerken unter dem Parkhaus schließen das Relais RUV ein. Nachdem die Richtung ausgewählt wurde, schaltet sich gleichzeitig mit dem RUV- oder LVL-Relais eines der Gegenrichtungs-Sperrrelais RBV oder RBN ein, das mit seinen Kontakten die Ausgabe nicht vorübergehender Rufsignale über den Teilkreis unterbricht.
In dem in Abb. gezeigten Schema. 2, a, um die Passagiere abzusenken, fährt die Kabine ohne anzuhalten in die oberste Etage des Gesprächs und senkt sich dann mit Zwischenstopps ab, und in dem in Abb. 2 gezeigten Diagramm. 2, b, wenn es notwendig ist, Passagiere abzuholen, fährt die Kabine in die unterste Etage des Anrufs und steigt dann bei vorbeifahrenden Haltestellen an.
In den betrachteten Schemata werden die Selektoren auf Relaiselementen hergestellt. Darüber hinaus kommen weitere Selektoren zum Einsatz: Nocken, fotoelektrisch, kontinuierliche Bürstenverfolgung, Schritt, auf statischen Elementen usw.
Bei großen Passagierströmen werden in einem Korridor mehrere Aufzüge installiert, die paarweise oder gruppenweise gesteuert werden, um den Komfort zu erhöhen und die Leistung zu verbessern. Die Anzahl der in Gruppen verbundenen Aufzüge beträgt in der Regel nicht mehr als vier, häufiger jedoch drei, obwohl auch Systeme bekannt sind, die bis zu acht Aufzüge in einer Gruppe enthalten.
Bei der Gruppensteuerung gibt es normalerweise drei Hauptmodi für den Aufzugsbetrieb: Spitzenanstieg, Spitzenabstieg und ausgeglichene Bewegung in beide Richtungen. Die Aktivierung der Aufzüge für den einen oder anderen Modus erfolgt durch den Disponenten oder automatisch über die für jede Aufzugsgruppe installierte Programmieruhr.
In Hochhäusern ist jede Gruppe von Aufzügen auf einen bestimmten Stockwerksbereich festgelegt, andere Stockwerke werden davon nicht bedient. Wenn in der Gruppe mehrere Aufzüge vorhanden sind, die einen Bereich oder ein niedriges Gebäude bedienen, können zur Erhöhung der durchschnittlichen Bewegungsgeschwindigkeit durch Reduzierung der Anzahl der Haltestellen separate Aufzüge für die geraden und ungeraden Etagen zugewiesen werden.
Um eine Doppel- oder Gruppensteuerung von Aufzügen zu ermöglichen, müssen ihre Steuerkreise kollektiv sein und Rufe zu jeder Etage in beide Richtungen müssen in jeder Richtung separat durch geeignete Speichergeräte registriert werden, die Relais, Transistoren usw. enthalten.
Betrachten Sie als Beispiel, das die Besonderheiten des Betriebs bei der paarweisen Steuerung von Aufzügen mit zusätzlichen Parkrelais des ersten Aufzugs 1PC und des zweiten Aufzugs 2PC widerspiegelt, einen Ausschnitt des in Abb. 1 dargestellten schematischen Diagramms. 3.
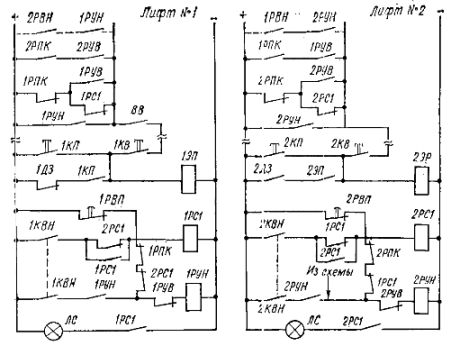
Reis. 3. Fragment eines schematischen Diagramms der gepaarten Aufzugssteuerung: ER – Etagenrelais, RPK – Kanalumschaltrelais, RVP-Automatikstartrelais
In diesem Fall beantwortet der Wagen, der mit Passagieren im ersten Stock abstieg, keine Anrufe aus anderen Stockwerken und wartet auf Passagiere. Befindet sich im ersten Stock kein Auto, wird das auf Befehl angehobene und freigegebene Auto automatisch in das erste Stockwerk geschickt, und wenn ein anderes Auto abgesenkt oder geparkt wird, bleibt das letzte am Ende des Fluges auf dem Stockwerk oder geht zur Ladezentrale und dient dem Rufbetrieb überwiegend in Sinkrichtung.
Das Parkrelais 1PC1 oder 2PC1 der Kabine im ersten Stock wird nach der Ankunft der Kabine im ersten Stock vom Endschalter 1KVN oder 2KVN (in den Kopiererminen installiert) eingeschaltet. Diese Relais sind blockiert.Daher weist die Einbeziehung eines davon darauf hin, dass dieser Wagen früher im Erdgeschoss ankam als der andere. In diesem Fall schaltet das Relais 1PC1 oder 2PC1 mit seinem Schließkontakt die LS-Signallampe ein und unterbricht mit seinem Öffnungskontakt den Klingelstromkreis seines Aufzugs, wodurch der Anruf unterbrochen wird, während die Kabine im ersten Stock geparkt ist.
Wenn die Kabine das erste Stockwerk verlässt, erlischt ihre LS-Signallampe, die Stromversorgung der angerufenen Stromkreise dieses Aufzugs wird sofort nach Freigabe der Kabine wiederhergestellt, und nachdem die Kabine eines anderen Aufzugs im ersten Stockwerk angekommen ist, wird ihr Computerrelais ausgeschaltet eingeschaltet. Diese Kabine bleibt im Erdgeschoss und wartet auf Passagiere (was durch das Aufleuchten der LS-Warnleuchte signalisiert wird). Wenn die auf Befehl gestiegene Kabine freigegeben wird und keine Rufe vorliegen, wird ein Signal an den Stromkreis gesendet, der die Relaisspulen 1RUN oder 2RUV, 1RUN oder 2RUV über die Öffnungskontakte des Endschalters 1KVN oder 2KVN und die Kabine einschaltet geht in den ersten Stock und t .n.
Die Motorsteuerungsausrüstung typischer Einzel-, Doppel- und Gruppenaufzüge befindet sich normalerweise auf typischen Schalttafeln, Stationen oder Steuereinheiten, die in Maschinenräumen installiert sind.