Das Verfahren zum Vorbereiten und Kompilieren von Programmen für speicherprogrammierbare Steuerungen
Die Funktionen der Gerätesteuerung werden durch Prozesstechnik und Organisation bestimmt. Daher sind sie im Allgemeinen recht spezifisch und individuell für jede Einheit oder jeden Standort. Wenn jedoch das Problem der Entwicklung effizienter, mobiler und flexibler Software für Automatisierungssysteme gestellt und gelöst wird, werden komplexe Steuerungsfunktionen üblicherweise als eine Menge einfacher Elementaraktionen wie „Aktivieren“, „Deaktivieren“, „Implementierungsverzögerung“ usw. dargestellt. .
Von diesen Positionen aus lassen sich die meisten Kontrollfunktionen bedingt auf zwei reduzieren, die für alle Aufgaben durchaus üblich sind – logisch und regulierend. Ersteres wird als allgemeiner Zeitaktionsalgorithmus und letzteres als Zeitparameter bezeichnet. Die allgemeinste Darstellung solcher typischer Funktionen zur Steuerung technologischer Geräte ist in Abb. dargestellt. 1, a und b.
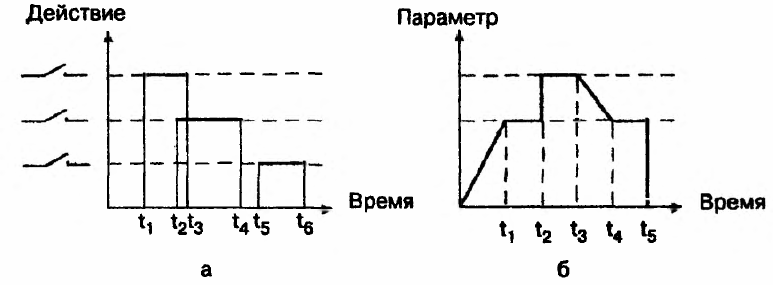
Reis. 1. Typische Steuerfunktionen von Prozessgeräten
Basierend auf der Analyse der quantitativen Merkmale der implementierten Steuerungsfunktionen in jedem konkreten Beispiel einer technologischen Ausrüstung können technische Anforderungen formuliert werden an eine speicherprogrammierbare Steuerung (SPS) als Kontrollmittel hinsichtlich Genauigkeit, Geschwindigkeit, Anzahl parallel zu lösender Aufgaben, Speicherkapazität, Zusammensetzung der Peripheriegeräte, Dialogtools usw.
Die Norm IEC 61131-3 beschreibt 5 Programmiersprachen, die aus der Erforschung der erfolgreichsten Eigenentwicklungen der Weltmarktführer im SPS-Markt resultieren:
-
die Sprache der Relais-Kontakt-Schaltungen (RKS) oder Kontaktpläne LD (Ladder Diagram),
-
Funktionsblockdiagramm-Sprache (FBD), FBD (Funktionsblockdiagramm),
-
IL-Sprache (Anweisungsliste) – typischer Assembler mit Akkumulator- und Label-Übergängen,
-
Die ST-Sprache (Structured Text) ist eine höhere Textsprache.
-
SFC-Diagramme (Sequential Function Chart). SFC verdankt seinen Ursprung Petri-Netzen.
SPS-Sprachen sind sehr originell und unterscheiden sich deutlich von bekannten Computerprogrammiersprachen.
Der Standard verpflichtet SPS-Entwickler nicht zur Implementierung aller Programmiersprachen. Typischerweise implementieren kleine SPS-Hersteller mehrere oder eine einzige Sprache. Die Priorität der Verwendung einer bestimmten Programmiersprache hängt in vielerlei Hinsicht von den historisch etablierten Traditionen der Branche oder des Anwendungsbereichs ab.
Die Standardisierung der Programmiersprachen und des SPS-Modells führte zur Entstehung spezialisierter Unternehmen, die sich mit dem Entwurf von Programmiersystemen für SPS beschäftigten und den Übergang von einer Programmiersprache zu einer Maschinensprache auf verschiedenen Ebenen ermöglichten:
-
beim Eingeben eines Programms;
-
beim Rendern;
-
beim Ändern oder Verschieben eines separaten Befehls- oder Programmbereichs;
-
wenn Syntaxfehler erkannt werden und Meldung an den Bediener.
Um diese Aufgaben auszuführen, kann das Programmiersystem erfolgreich im lokalen Modus, also unabhängig von der Steuerung, arbeiten. Dies gibt dem Programmierer die Möglichkeit, ein Programm von jedem beliebigen Ort aus zu schreiben und nicht in einer Produktionswerkstatt, also in einer Umgebung, die für den kreativen Prozess günstiger ist. Die Möglichkeit der Modellierung erleichtert das Debuggen des Programms erheblich und verbessert die Arbeitsorganisation.

Die Hauptschritte der Vorbereitung und Programmierung für speicherprogrammierbare Steuerungen sind wie folgt:
1. Bestimmen Sie, was das gesteuerte System (Steuerungsobjekt) tun soll, die Steuerungsziele und andere zusätzliche Funktionen, die das Steuerungssystem ausführt, die zeitliche Abfolge der von den Aktoren ausgeführten Vorgänge und den Zustand der Sensoren und Steuergeräte.
2. Verfassen Sie den Algorithmus des Programms in grafischer Form.
3. Bestimmen Sie, welche Module zum Anschluss von Sensoren, Steuergeräten, Aktoren, Alarmen und anderen für die Verwaltung des Standorts erforderlichen Geräten erforderlich sind.
Analysieren Sie bei der Modulauswahl die Parameter der Ein-/Ausgangssignale (Spannungs- und Strompegel) und die Funktionalität der Module. Achten Sie auf die Einsatzmöglichkeit intelligente Module, das eine Vorverarbeitung von Eingangssignalen und einige lokale Steuerfunktionen durchführen kann, wodurch die Komplexität der Programmierung erheblich reduziert wird.
4.Erstellen Sie ein Diagramm oder eine Tabelle, um alle Ein- und Ausgabegeräte des Steuerungsobjekts und die im Steuerungsprozess verwendeten Geräte mit den Controllermodulen zu verbinden.
5. Schreiben Sie ein Programm in einer der SPS-Programmiersprachen, das eine bestimmte Abfolge von Operationen und deren Verbindung ausführt und mögliche Notfallsituationen entwickelt.
6. Überprüfen Sie das Programm auf Syntaxfehler und korrigieren Sie diese, dann auf Laufzeitfehler und nehmen Sie auch entsprechende Korrekturen vor.
7. Schreiben Sie das Programm und alle notwendigen Betriebsparameter in die Steuerung.
8. Nachdem die Steuerung vollständig aufgebaut ist, überprüfen Sie das Programm im tatsächlichen Steuerungsprozess und nehmen Sie gegebenenfalls genauere Einstellungen vor.
9. Speichern Sie zwei Kopien des letzten Programms und speichern Sie sie an separaten Orten.