Geschlossene automatische Kontrollsysteme
 Geschlossene automatische Steuerungssysteme (ACS) unterscheiden sich von offenen Schaltkreisen in der verwendeten Ausrüstung und in der Vollständigkeit der Automatisierung. Bei geöffnetem ACS erhält die Haupteinheit (einschließlich der Steuerausrüstung) keine Informationen über den tatsächlichen Betriebsmodus der elektrischen Anlage (Antriebsmotor, laufende Maschine).
Geschlossene automatische Steuerungssysteme (ACS) unterscheiden sich von offenen Schaltkreisen in der verwendeten Ausrüstung und in der Vollständigkeit der Automatisierung. Bei geöffnetem ACS erhält die Haupteinheit (einschließlich der Steuerausrüstung) keine Informationen über den tatsächlichen Betriebsmodus der elektrischen Anlage (Antriebsmotor, laufende Maschine).
In einem geschlossenen ASUP werden Informationen an die Steuerelemente übermittelt, was mit der Abgabe entsprechender Befehlssignale einhergeht. Der Schaltkreis, der diese Informationen überträgt, schließt den Regelkreis und bildet ein geschlossenes ACS oder Feedback-ACS.
Der Unterschied zwischen geschlossenem und offenem ACS lässt sich am Beispiel der Drehzahlregelung eines Elektromotors in einem Generator-Motor-System (G-D) erklären. Bei geöffnetem ACS (Abb. 1, a) wird die Solldrehzahl des Elektromotors manuell über Potentiometer P eingestellt. Die Drehzahleinstellung erfolgt optisch über einen Drehzahlmesser, der vom TG-Tachogenerator gespeist wird. Eine etwaige Abweichung der Drehzahl vom Sollwert wird vom Bediener durch Betätigen des Potentiometer-Schiebers beseitigt.
In einem geschlossenen ACS (Abb.1, b) Der Anker des TG-Tachogenerators ist in den Erregerkreis des OVG-Generators eingebunden, wodurch ein geschlossenes oder Rückkopplungssystem (in diesem Fall mit Drehzahlrückführung) entsteht.
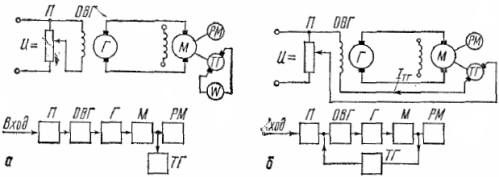
Reis. 1. Steuerkreis des Elektromotors im G-M-System: a – offenes ACS, b – geschlossenes ACS
Der vom Tachogenerator (Aztg) erzeugte Strom ist in einem geschlossenen Stromkreis auf den Strom des Potentiometers (Azn) gerichtet und der resultierende Strom wirkt im Stromkreis gleich der geometrischen Differenz dieser Ströme. Über den Schieberegler des Potentiometers stellt der Bediener den Wert des resultierenden Stroms in der Erregerspule des OVG ein, bei dem die entsprechende Drehzahl des Elektromotors bereitgestellt wird. Hier endet die Rolle des Bedieners. Zukünftig hält das System die eingestellte Betriebsart des Elektroantriebs automatisch mit einer gewissen Genauigkeit ein.
Angenommen, infolge der Lastspitze ist die Drehzahl des Elektromotors im Vergleich zur angegebenen Drehzahl gesunken. Mit der Drehzahlreduzierung geht eine entsprechende Reduzierung der Drehzahl des Tachogenerators und der Spannung an seinen Klemmen einher. Dies wiederum führt zu einer Verringerung des Stroms Aztg im Rückkopplungskreis und in einer bestimmten Position des Schiebereglers des Potentiometers zu einer Erhöhung des resultierenden Stroms in der Erregerwicklung des Generators. Die Generatorspannung und die Motordrehzahl erhöhen sich entsprechend.
Der Prozess der Erhöhung von Geschwindigkeit und Spannung wird fortgesetzt, bis der Strom in der Rückkopplungsschleife den eingestellten Wert und die Motorgeschwindigkeit den eingestellten Wert erreicht.
Bei der Analyse automatischer Steuerungssysteme Funktionsdiagramme… In Abb.2 Getriebe-Funktionsschema von ACS, das die folgenden Elemente umfasst:
1 – Hauptgerät, das die Betriebsart einstellt, einen Befehl gibt, einen Startimpuls oder ein Signal gibt,
2 – Vergleichselement. Es umfasst das Signal X1 vom Master, das Signal X0, das die Geschwindigkeit bzw. Höhe der Regelgröße bestimmt. Unter Berücksichtigung des Signals des neunten Hauptrückkopplungselements vergleicht Element 2 die empfangenen Signale und sendet das zusätzlich korrigierte Signal X2,
3 – das transformierende Element, das Signal op wandelt es in eine andere Form um, die für die weitere Übertragung bequemer ist. Beispielsweise wird das Signal X2 in Form von hydraulischem (pneumatischem, mechanischem) Druck geliefert. Element 3 wandelt es in einen elektrischen Strom um. Da diese Art der Umwandlung möglicherweise zusätzliche Energie erfordert, wird Element 3 an eine PE-Energiequelle angeschlossen.
4 – Additionselement, es empfängt zwei Signale: X3 und X8 vom Korrekturelement (Speicherelement) 8. Diese Signale werden von Element 4 summiert und an das nächste Element gesendet,
5 – Verstärkungselement, das Eingangssignal X1 kann schwach sein und muss für die nachfolgende Übertragung verstärkt werden. Dies geschieht über Element 5, das an die PE-Stromquelle angeschlossen ist.
6 – ausführendes Element, führt das empfangene Signal aus (Elektromotor, elektromagnetisches Relais, Servomotor),
7 – verstellbares Objekt oder Arbeitsmaschine.
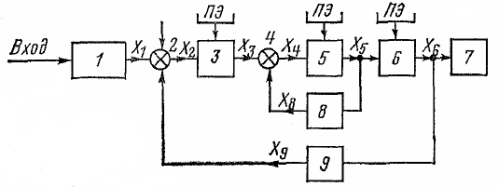
Reis. 2. Funktionsdiagramm von ACS
Jedes Automatisierungselement ist ein Energiewandler, an dessen Eingang der Wert X' anliegt und am Ausgang der Wert X entnommen wird. „Für jedes Element in einem stationären Zustand gibt es eine bestimmte Abhängigkeit X“ (X‘), die als statisches Merkmal bezeichnet wird.
Ein geschlossenes automatisches Steuerungssystem zeichnet sich durch das Vorhandensein von Rückmeldungen aus; Es verfügt über mindestens eine Rückkopplungsschleife, die den Ausgang des Systems mit seinem Eingang verbindet. Darüber hinaus kann es zu einem sogenannten internen Feedback kommen, das den Ausgang und Eingang einzelner ACS-Elemente verbindet.
Das Feedback wird in hart und flexibel unterteilt. Harte Beschränkungen wirken sowohl im transienten als auch im stationären Betriebsmodus des Systems, flexible – nur im transienten. Unterscheiden Sie zwischen positivem und negativem Feedback. Wenn der eingestellte Wert zunimmt, wird er durch die positive Verbindung noch mehr erhöht, während die negative Verbindung im Gegenteil abnimmt. Rückmeldungen können Signale proportional zu Drehwinkel, Geschwindigkeit, Spannung, Strom usw. übertragen. und werden entsprechend als Winkel-, Geschwindigkeits-, Spannungs- und Stromrückmeldungen bezeichnet. Weitere Details finden Sie hier: Elemente von Automatisierungssystemen
Nach dem Funktionsprinzip lassen sich ACS in drei Gruppen einteilen:
-
kontinuierlicher Betrieb, bei dem das Verhältnis zwischen Regel- und Sollwert nicht gestört wird,
-
Impulswirkung, bei der in regelmäßigen Abständen der Zusammenhang zwischen den Regel- und Sollwerten erfolgt,
-
Relaisaktion, bei der die Kommunikation nur dann erfolgt, wenn ein Wert einen bestimmten Wert erreicht.
Abhängig vom Gesetz, nach dem sich ein bestimmter Wert im Laufe der Zeit ändert, kann ACS auch in drei Gruppen eingeteilt werden:
-
Systeme mit konstantem oder niedrigem Sollwert, bei denen der automatisch geregelte Wert konstant gehalten wird. Hierbei handelt es sich um Stabilisierungssysteme, bei denen es sich im Wesentlichen um automatische Kontrollsysteme (ACS) handelt.
-
Systeme, bei denen der Zielwert nach einem bestimmten, vorgegebenen Programm verändert wird. Es handelt sich um ein Software-Managementsystem,
-
Systeme, in denen ein gegebener Wert stark und nach einem willkürlichen Gesetz variieren kann, d. h. Trackingsysteme.