Executive-Gleichstrommotoren und Tachogeneratoren
DC-Führungsmotoren
 Gleichstromantriebe sind Maschinen mit geringer Leistung, die in der Automatisierung und Telemechanik sowie in automatischen Steuerungs-, Regelungs- und Steuerungssystemen automatisierter Anlagen eingesetzt werden, wo sie das elektrische Signal eines Messgeräts – eine Steuerspannung – in eine Winkelbewegung einer Welle umwandeln, um sie zu beeinflussen von Steuer-, Regel- oder Steuergeräten... In Fällen, in denen das Eingangssignal nicht ausreicht, um den Antriebsmotor anzutreiben, wird ein magnetischer oder Halbleiter-Leistungsverstärker verwendet.
Gleichstromantriebe sind Maschinen mit geringer Leistung, die in der Automatisierung und Telemechanik sowie in automatischen Steuerungs-, Regelungs- und Steuerungssystemen automatisierter Anlagen eingesetzt werden, wo sie das elektrische Signal eines Messgeräts – eine Steuerspannung – in eine Winkelbewegung einer Welle umwandeln, um sie zu beeinflussen von Steuer-, Regel- oder Steuergeräten... In Fällen, in denen das Eingangssignal nicht ausreicht, um den Antriebsmotor anzutreiben, wird ein magnetischer oder Halbleiter-Leistungsverstärker verwendet.
Antriebsmotoren arbeiten typischerweise mit häufigen Starts, Stopps und Rückwärtsfahrten. Sie zeichnen sich durch ein erhebliches Anlaufdrehmoment und eine hohe Drehzahl aus. In den meisten Fällen sind die Abhängigkeiten des Ankerdrehmoments und der Ankergeschwindigkeit von der Steuerspannung nahezu linear.
 Je nach Stromversorgungssystem der Stromkreise unterscheidet man zwischen ankergesteuerten und polgesteuerten Antriebsmotoren.Bei der Ankersteuerung ist die Steuerwicklung die Ankerwicklung, mit der die Steuerspannung an ihre Anschlüsse geliefert wird, und der konstante Erregerstrom stellt eine unabhängige Quelle für elektrische Energie mit konstanter Spannung dar. Bei der Polsteuerung dient die Steuerspule als Primärpol-Erregerspule und die Steuerspannung wird an ihre Klemmen angelegt, während die von einer unabhängigen Gleichspannungsquelle eingestellte Ankerklemmenspannung unverändert bleibt.
Je nach Stromversorgungssystem der Stromkreise unterscheidet man zwischen ankergesteuerten und polgesteuerten Antriebsmotoren.Bei der Ankersteuerung ist die Steuerwicklung die Ankerwicklung, mit der die Steuerspannung an ihre Anschlüsse geliefert wird, und der konstante Erregerstrom stellt eine unabhängige Quelle für elektrische Energie mit konstanter Spannung dar. Bei der Polsteuerung dient die Steuerspule als Primärpol-Erregerspule und die Steuerspannung wird an ihre Klemmen angelegt, während die von einer unabhängigen Gleichspannungsquelle eingestellte Ankerklemmenspannung unverändert bleibt.
In der Regel kommt eine Ankerlenkung zum Einsatz. Durch Umpolen der Steuerspannung dreht sich der Anker in die entgegengesetzte Richtung.
Executive-Gleichstrommotoren werden mit Nennleistungen von einem Bruchteil eines Watts bis zu 600 W in Normal- und Sonderausführung hergestellt.
 Motoren normaler Bauart ähneln Gleichstrommaschinen für den allgemeinen Gebrauch, unterscheiden sich jedoch von ihnen dadurch, dass der Rahmen mit den Hauptpolen wie der Anker aus dünnen, voneinander isolierten Blechen aus Elektrostahl zusammengesetzt ist, was die Eigenschaften dieser Maschinen verbessert unter Übergangsbedingungen. Darüber hinaus gibt es bei diesen Maschinen keine zusätzlichen Pole, da die Ankerrückwirkung gering ist und die Schaltvorgänge völlig zufriedenstellend sind. Da die Ankerdrehzahl niedrig ist, befindet sich bei solchen Motoren kein Lüfter auf der Welle.
Motoren normaler Bauart ähneln Gleichstrommaschinen für den allgemeinen Gebrauch, unterscheiden sich jedoch von ihnen dadurch, dass der Rahmen mit den Hauptpolen wie der Anker aus dünnen, voneinander isolierten Blechen aus Elektrostahl zusammengesetzt ist, was die Eigenschaften dieser Maschinen verbessert unter Übergangsbedingungen. Darüber hinaus gibt es bei diesen Maschinen keine zusätzlichen Pole, da die Ankerrückwirkung gering ist und die Schaltvorgänge völlig zufriedenstellend sind. Da die Ankerdrehzahl niedrig ist, befindet sich bei solchen Motoren kein Lüfter auf der Welle.
Zu den Motoren besonderer Bauart zählen magnetoelektrische Maschinen mit Erregung des Hauptmagnetfeldes durch Permanentmagnete sowie Maschinen mit geringer Trägheit, die sich in der Ausführung des Ankers unterscheiden.Zu letzteren gehören: Motoren mit einem hohlen, nichtmagnetischen Anker – einem hohlen, dünnwandigen Kunststoffzylinder mit einer gepressten Spule aus Kupferdraht mit einem internen festen ferromagnetischen Magnetkreis, der auf einem Lagerschild montiert ist – und weniger langlebige Motoren mit einem Scheibenanker – a Dünne nichtmagnetische Scheibe aus Keramik, Textolith, Glas und manchmal Aluminium mit einer gedruckten Spule, bei der es sich um einen Satz Kupferfoliendrähte handelt, die radial auf beiden Seiten der Scheibe angeordnet sind und auf denen Silbergraphitbürsten gleiten. Die genannten Designs zeichnen sich durch ein geringes Trägheitsmoment des Ankers aus, was für eine hohe Drehzahl des Exekutivmotors sorgt.

Die Masse von Gleichstrom-Führungsmotoren ist zwei- bis viermal kleiner als die Masse von Asynchron-Führungsmotoren mit gleicher Nennleistung, und ihr Wirkungsgrad beträgt bei einer Nennleistung von 5 ... 10 W etwa 0,3 und erreicht einen Wert von 0,65 und weniger höher bei Motoren mit einer Nennleistung von 200 – 300 W.

DC-Tachogeneratoren
 Gleichstrom-Tachogeneratoren sind Maschinen mit geringer Leistung, die einen mechanischen Wert in ein elektrisches Signal – eine Ausgangsspannung – umwandeln sollen. Sie dienen insbesondere zur Steuerung und Messung der Drehzahl der Antriebswelle, an die die Tachogeneratorwelle angeschlossen ist, deren Ankerklemmen mit der Messeinrichtung verbunden sind. Darüber hinaus werden Tachogeneratoren in elektromechanischen Rechengeräten zur Durchführung von Rechenoperationen sowie in Geräten zur automatischen Verarbeitung erzeugter Beschleunigungs- und Dämpfungssignale eingesetzt.
Gleichstrom-Tachogeneratoren sind Maschinen mit geringer Leistung, die einen mechanischen Wert in ein elektrisches Signal – eine Ausgangsspannung – umwandeln sollen. Sie dienen insbesondere zur Steuerung und Messung der Drehzahl der Antriebswelle, an die die Tachogeneratorwelle angeschlossen ist, deren Ankerklemmen mit der Messeinrichtung verbunden sind. Darüber hinaus werden Tachogeneratoren in elektromechanischen Rechengeräten zur Durchführung von Rechenoperationen sowie in Geräten zur automatischen Verarbeitung erzeugter Beschleunigungs- und Dämpfungssignale eingesetzt.
Tachogeneratoren sind magnetoelektrisch mit Erregung des Hauptmagnetfeldes mittels Permanentmagneten und elektrodynamisch mit elektromagnetischer Erregung durch das Magnetfeld. Erregerspule, die von einer unabhängigen Gleichspannungsquelle gespeist wird.
Die Ausgangsspannung des Tachogenerators im Leerlauf variiert linear mit der Drehzahl des Ankers, und unter Last wird diese Linearität etwas gestört, und je mehr, desto weniger Widerstand hat das an die Ankerklemmen angeschlossene Messgerät. Dennoch gibt es für jeden Tachogenerator einen relativ kleinen Bereich gemessener Geschwindigkeiten, innerhalb dessen bei ausreichend großem Messgerätewiderstand und konstanten Erregerkreisbedingungen die Ausgangskennlinie als praktisch linear angesehen werden kann.
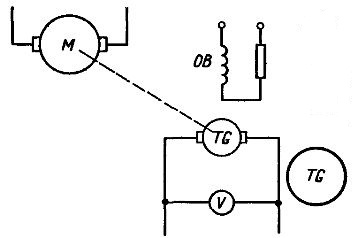
Schematische Darstellung des Einbaus eines Gleichstrom-Tachogenerators mit unabhängiger Erregung
 Ein wesentlicher Nachteil von Gleichstrom-Tachogeneratoren ist die Schwankung der Ausgangsspannung aufgrund einer leichten periodischen Änderung des Magnetflusses aufgrund des ungleichmäßigen Luftspalts und der ungleichen Leitfähigkeit des Ankers in verschiedenen Radialrichtungen, auch aufgrund seiner Zahnstruktur Magnetkreis sowie durch Vibrationen der Bürsten, Rauheit und Elliptizität des Kollektors und Schaltvorgänge – weitgehend eliminiert bei einem Hohlanker-Tachogenerator, der wie ein trägheitsarmer Gleichstrom-Führungsmotor mit a aufgebaut ist ähnliche Armatur.
Ein wesentlicher Nachteil von Gleichstrom-Tachogeneratoren ist die Schwankung der Ausgangsspannung aufgrund einer leichten periodischen Änderung des Magnetflusses aufgrund des ungleichmäßigen Luftspalts und der ungleichen Leitfähigkeit des Ankers in verschiedenen Radialrichtungen, auch aufgrund seiner Zahnstruktur Magnetkreis sowie durch Vibrationen der Bürsten, Rauheit und Elliptizität des Kollektors und Schaltvorgänge – weitgehend eliminiert bei einem Hohlanker-Tachogenerator, der wie ein trägheitsarmer Gleichstrom-Führungsmotor mit a aufgebaut ist ähnliche Armatur.
Die Ungenauigkeit der Installation der Bürsten auf der geometrischen Neutralität des Drehzahlmesserkollektors führt zu einer Asymmetrie der Ausgangsspannung, d.h.um in der Ankerwicklung zwei unterschiedliche Spannungen in entgegengesetzter Drehrichtung bei gleicher Drehzahl zu erzeugen. Bei richtiger Anordnung der Bürsten liegt die Spannungsasymmetrie im Bereich von 0,3 bis 1 % der Nennspannung des Tachogenerators.