Die Verwendung von Induktionsmotoren mit gewickeltem Rotor als Teil eines Frequenzumrichters
 Bei der Aufrüstung elektrischer Kranantriebe ist es zur Kostensenkung sinnvoll, vorhandene und funktionierende Kran-Asynchronmotoren zu verwenden. Die meisten Haushaltsarmaturen sind in der Regel mit Phasenläufermotoren der Serien MT und 4MT ausgestattet.
Bei der Aufrüstung elektrischer Kranantriebe ist es zur Kostensenkung sinnvoll, vorhandene und funktionierende Kran-Asynchronmotoren zu verwenden. Die meisten Haushaltsarmaturen sind in der Regel mit Phasenläufermotoren der Serien MT und 4MT ausgestattet.
Von Interesse ist die Möglichkeit, Kran-Asynchronmotoren mit phasenstarrem Rotor als Teil eines frequenzgeregelten Elektroantriebs einzusetzen. Derzeit hat LLC „Cranpriborservice“ positive Erfahrungen mit dem Betrieb von Asynchronmotoren mit einer Leistung von bis zu 55 kW mit kurzgeschlossenem Phasenrotor bei Antrieb durch Frequenzumrichter.
Eine solche technische Lösung entstand bei der Modernisierung von Kranen, die zuvor mit herkömmlichen Kranantriebssystemen auf Basis eines Asynchronmotors mit Phasenrotor ausgestattet waren.Um die Kosten einer solchen Aufrüstung zu senken, wurden Elektromotoren und teilweise Ballastwiderstände eingespart, die nach Überprüfung der Berechnungen und Änderung des Anschlussschemas als Bremswiderstände verwendet wurden.
Aus energetischer Sicht sind die Elektromotoren mit gewickeltem Rotor der Serien MT und 4MT den Käfigläufer-Elektromotoren derselben Serie noch vorzuziehen, da sie einen geringeren Wirkwiderstand der Rotorwicklung und damit geringere Verluste aufweisen im Kupfer des Rotors im Gleichgewicht.
Ein Elektromotor mit gewickeltem Rotor, der für den Betrieb in einem herkömmlichen Kransystem mit elektrischem Antrieb mit Rheostatregelung ausgewählt wurde, hat beim Umschalten auf die Stromversorgung über einen Frequenzumrichter (sofern die Betriebsart des Mechanismus nicht überschritten wird) immer einen niedrigeren Startwert. Verluste erhöhen.
In den meisten Fällen werden Kran-Upgrades durchgeführt, um den Geschwindigkeitsregelbereich für präzise Montagevorgänge oder beim Übertragen des Krans auf den Boden zu erweitern. In diesem Fall ist die Betriebsweise des Krans in der Regel niedriger als bei seiner Herstellung festgelegt. Mit der Vektorregelung werden zudem stationäre Verluste reduziert, da die Leistungsaufnahme im Elektroantrieb im Teillastbereich optimiert wird.

Es gibt die Meinung, dass die Spannung bei pulsiert PulsweitenmodulationDie auf die Motorwicklungen einwirkende Wärme führt zu einer beschleunigten Alterung der Isolierung. In diesem Fall empfiehlt sich der Einsatz von „speziellen Elektromotoren für den Betrieb als Teil von Frequenzumrichtern“.Zwar unterscheidet sich die Isolationsklasse solcher Elektromotoren nicht von der Isolationsklasse von Haushaltselektromotoren der Serien MT und 4MT. Der mehr als zehnjährige Betrieb von Phasenrotor-Elektromotoren mit kurzgeschlossenen Ringen als Teil eines Frequenzumrichters hat ihre hohe Zuverlässigkeit bewiesen.
Ein Merkmal der Konstruktion von Motoren mit Phasenrotor ist das Vorhandensein von Schleifringen und Bürsten. Daher ist ein offener Stromkreis einer der Rotorphasen solcher Abgriffe aufgrund von Bürstenverschleiß oder Beschädigung des Bürstenhalters sehr wahrscheinlich.
Um die Funktionsfähigkeit des Elektroantriebs bei Rotorphasenverlust festzustellen, wurde am Stand von Cranpriborservice LLC ein Experiment mit einem Elektroantrieb des Hubmechanismus mit einem Frequenzumrichter vom Typ Altivar 71 und einem 55-kW-Motor durchgeführt. Das Steuergesetz des Elektromotors ist vektoriell. Vor dem Heben einer Nennlast „vom Gewicht“ wurde eine der kurzgeschlossenen Phasen des Rotors des 55-kW-Motors abgeklemmt.
Anschließend wurde der Elektroantrieb in Bergaufrichtung mit einer Frequenz von 25 Hz eingeschaltet. Gleichzeitig beschleunigt der Elektroantrieb in Aufstiegsrichtung, allerdings sind Geschwindigkeitsschwankungen spürbar.
In Abb. In Abb. 1 zeigt die experimentellen Oszillogramme der Drehzahl des Elektroantriebs bei kurzgeschlossenem Rotor und bei Abschaltung einer der Phasen im Rotor.
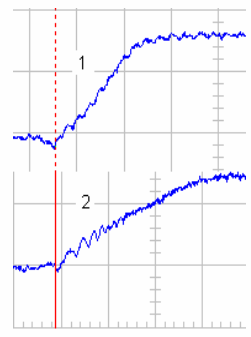
Reis. 1. Experimentelle Oszillogramme der Drehzahl des Elektroantriebs beim Heben der Nennlast 0-3P: 1-Rotorringe sind kurzgeschlossen; 2. Eine der Rotorphasen ist unterbrochen.
Aus den Oszillogrammen ist ersichtlich, dass die Beschleunigung des Elektroantriebs in Aufstiegsrichtung bei gebrochener Phase im Rotor etwa 1,5-mal länger anhält als bei vollständig verkürzten Ringen. Unter dem Gesichtspunkt des Schutzes gegen herabstürzende Lasten ist eine solche Regelung jedoch akzeptabel.
Es ist auch zu beachten, dass der vom Umrichter während des Phasenausfalls gemessene Statorstrom sich nicht vom Strom im symmetrischen Modus unterscheidet, obwohl sein Wert theoretisch höher sein sollte. Der thermische Schutz des Elektromotors basiert auf der Berechnung von I2t, daher findet sein Betrieb in diesem Modus nicht statt.
Dadurch wird der Phasenverlust im Rotor möglicherweise vom Wartungspersonal nicht bemerkt und der Motor kann durch Überhitzung beschädigt werden. Als Schutz gegen einen solchen Modus kann der Einbau eines Thermorelais in den Stator- oder Rotorkreis vorgeschlagen werden, diese Lösung erfordert jedoch eine experimentelle Überprüfung.