Die Auswahl eines asynchronen Elektromotors für den Betrieb im dynamischen Bremsmodus durch Selbsterregung
 Asynchroner Elektromotor mit gewickeltem Rotor mit dem einfachsten Steuerungsschema – die Einbeziehung eines Widerstands in den Rotorkreis hat äußerst geringe Steuerungseigenschaften. Daher wurden vor der Verfügbarkeit von Frequenzumrichtern auf dem Markt verschiedene Systeme entwickelt, um eine reduzierte Geschwindigkeit im Abwärtsmodus zu erreichen.
Asynchroner Elektromotor mit gewickeltem Rotor mit dem einfachsten Steuerungsschema – die Einbeziehung eines Widerstands in den Rotorkreis hat äußerst geringe Steuerungseigenschaften. Daher wurden vor der Verfügbarkeit von Frequenzumrichtern auf dem Markt verschiedene Systeme entwickelt, um eine reduzierte Geschwindigkeit im Abwärtsmodus zu erreichen.
Eigentlich sind es nicht so viele davon. Im Ausland verbreitete sich der Einsatz einer zusätzlichen elektrischen Maschine – einer Wirbelbremse, die auf derselben Welle wie der Hauptmotor montiert war. Das Schema ermöglicht es, beim Absenken der Last ausreichend steife mechanische Eigenschaften zu erhalten, ein solcher Elektroantrieb weist jedoch extrem niedrige Energieeigenschaften auf (Bremsenergie wird in der Wirbelbremse freigesetzt). Darüber hinaus ist die Wirbelbremse relativ teuer und verkompliziert die Anordnung des mechanischen Teils erheblich.
Um die Landegeschwindigkeit in Hebemechanismen zu erhalten, die Ende der 1970er Jahre im Dynamo-Werk auf einem Asynchronmotor mit Phasenrotor basieren, hat ein Designteam unter der Leitung von E.M. Pevzner führte das selbsterregte dynamische Bremsen ein.
Ein solcher Elektroantrieb wird häufig in Haushaltskranen eingesetzt (Panels vom Typ TSD, TSDI, KSDB für Brücken-, Portal- und Portalkrane, Bedienfelder für Turmdrehkrane KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Wir sprechen also von Zehntausenden Kranen im Einsatz.
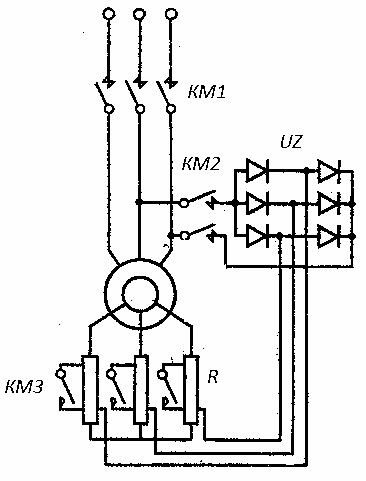
Reis. 1. Schema der Einbeziehung eines Asynchronmotors in den dynamischen Bremsmodus durch Selbsterregung
Das Prinzip der dynamischen Bremsung mit Selbsterregung ist wie folgt:
Der Rotorkreis umfasst Dreiphasengleichrichter UZ (Abb. 1). Über das Schütz KM1 wird der Elektromotor vom Netz getrennt. Die gleichgerichtete Spannung wird über das Schütz KM2 an die Statorwicklung angeschlossen. Schützkontakte KM3 sind geschlossen. Beim Lösen der Bremse (im Diagramm nicht dargestellt) beginnt sich die Motorwelle unter der Wirkung des fallenden Gewichts zu drehen.
In der Rotorwicklung wird eine EMK induziert, unter deren Einfluss ein Strom im Rotor-Stator-Kreis zu fließen beginnt. Der Motor entwickelt das Bremsmoment, die Last wird mit konstanter Geschwindigkeit abgesenkt. Der Geschwindigkeitswert wird durch den Widerstandswert des Rotorkreises bestimmt. Je größer der Widerstand, desto schneller ist die Sinkgeschwindigkeit. Um die Drehzahl zu erhöhen, wird das Schütz KM3 ausgeschaltet.
Im dynamischen Bremsmodus mit Selbsterregung verbraucht der Elektroantrieb Strom aus dem Netzwerk nur, um die hydraulischen Bremsdrücker und die Relais-Schütz-Ausrüstung mit Strom zu versorgen. Als Beispiel zeigt Abb. In Abb. 7 zeigt die mechanischen Eigenschaften eines Elektroantriebs mit TSD-Panel.
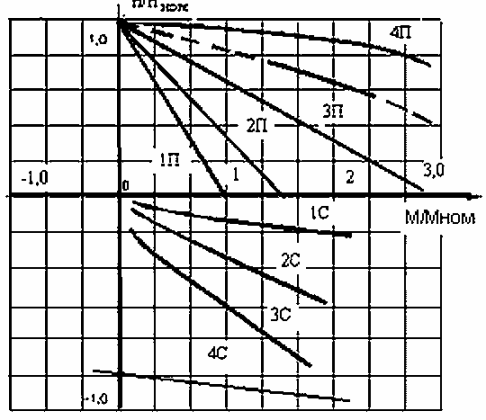
Reis. 2. Mechanische Eigenschaften des elektrischen Antriebs des Hebemechanismus mit dem TSD-Panel
Dynamische Bremseigenschaften werden mit 1C, 2C, 3C bezeichnet. Es ist zu erkennen, dass die Merkmale eine ausreichende Härte aufweisen. Die Geschwindigkeitsanpassung erfolgt im Bereich 1:8, was für Massenarmaturen in den meisten Fällen ausreichend ist.
Voraussetzung für die Selbsterregung des Elektromotors ist:
Wobei x '2- induktiver Widerstand der Rotorwicklung, Ohm; хо- induktiver Widerstand des Magnetisierungskreises. Om
Wobei ks — Koeffizient des Schemas
kd – Reduktionskoeffizient des Rotorstroms zum Statorstrom; kcx – Koeffizient der Korrekturschaltung für eine dreiphasige Brückenschaltung kx = 0,85; kt ist der Transformationskoeffizient des Motors vom Stator zum Rotor
Der Koeffizient kd hängt vom Anschlussschema der Statorwicklungen ab, die bei Haushaltswasserhahnmotoren bei einer Netzspannung von 380 V sternförmig geschaltet sind.
Der Koeffizient kt hängt vom Transformationskoeffizienten ab, d.h. des Verhältnisses von Statorspannung zu Rotorspannung, das vom Motortyp abhängt. Beispielsweise werden für mehrere Elektromotoren der MT- und 4MT-Serie der Wert und die zugehörigen Parameter tabellarisch aufgeführt. 1.
Tabelle 1.
Leistung des Elektromotortyps, kWt Rotorspannung, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512-6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0, 9 0,7 0,083 2,98 1,02
Die Bedingung кс ≥ √(1 + 2х '2/хо) wird für Motoren des Typs MTN412-6, 4MTN225L6 erfüllt, die als „erregt“ bezeichnet werden können. Solche Elektromotoren gehen in den Selbsterregungsmodus über, ohne dass zusätzliche Schaltungsentscheidungen getroffen werden müssen. Bei Niederspannungs-Komplettgeräten (Niederspannungsschaltanlagen oder Schalttafeln), die für die Zusammenarbeit mit solchen Motoren ausgelegt sind, ist jedoch eine geringe Anfangserregung für einen zuverlässigen Betrieb vorgesehen.
Die anfängliche Anregung erfolgt durch Übergabe einer Konstanten, der sogenannten Ein kleiner Wert des „Versorgungsstroms“ (normalerweise nicht mehr als 10 % des Nennstroms des Motors) von einem Einweggleichrichter. Bei erregten Motoren ist dies in jedem Fall ausreichend, um zuverlässig in den selbsterregten dynamischen Bremsmodus überzugehen.
Elektromotoren MTN512-6, 4MTN280M6, für die die Bedingung кс ≥ √(1 + 2х '2/хо) nicht erfüllt ist, gelten als „unerregt“. Dies bedeutet nicht, dass solche Motoren nicht im dynamischen Bremsmodus mit Selbsterregung arbeiten können, aber der Wert des für sie erforderlichen zusätzlichen Stroms erreicht 50 % des Nennstroms des Stators.Dies erfordert den Einsatz spezieller NKU (Bedienpulte) für nicht erregte Elektromotoren. …
Der Elektromotor Typ 4MTN280L10 mit кс = √(1 + 2х '2/хо) befindet sich an der Grenze der Selbsterregung und jede zufällige Änderung der Parameter kann die Selbsterregungsbedingung verletzen. Daher kann ein solcher Motor auch als nicht erregbar eingestuft werden.
Der Hauptparameter, der die Fähigkeit des Elektromotors zur Selbsterregung beeinflusst, ist die Nennspannung des Rotors E2nom. Der kritische Wert von E2nom, bei dem ohne großen Versorgungsstrom keine Selbsterregung auftritt, sollte mit 300 V angenommen werden.
Diese Eigenschaft des selbsterregenden dynamischen Bremsmodus wurde vom Dynamo-Werk und der Sibelektromotor PO bei der Entwicklung einer Serie von 4MT-Kran-Elektromotoren in den frühen 1980er Jahren berücksichtigt.
Insbesondere wurde der E2nom-Wert für einige Elektromotoren im Vergleich zur vorherigen MT-Serie reduziert, um die Motoren erregbar zu machen.
Beispielsweise wurde für den Elektromotor 4MTN225L6, der häufig im Elektroantrieb von Turmdrehkranen eingesetzt wird, E2nom im Vergleich zum vorherigen Motor der MTN512-6-Serie von 340 auf 290 V reduziert, wodurch der Motor selbsterregt wurde. Später begann die OJSC „Sibelelectromotor“ mit der Produktion des Elektromotors 4MTM225L6 mit den gleichen Parametern.
Im Laufe der Zeit begannen andere Hersteller, Elektromotoren mit einem ähnlichen Zweck zu produzieren.
Das Rzhevsky Crane Construction Plant produziert den Elektromotor MKAF225L6, die Siberian Electrotechnical Company produziert den Elektromotor 4MTM225L6 PND.Obwohl sich das Erscheinungsbild aufgrund der technologischen Möglichkeiten der einzelnen Hersteller vom Prototyp unterscheidet, weisen alle diese Elektromotoren die gleichen elektrischen Parameter und Einbaumaße auf und sind vollständig austauschbar.
Der Unterschied in den Namen der Motoren ermöglicht es dem Benutzer, eine fundierte Auswahl für den einen oder anderen Hersteller zu treffen, basierend auf seinen eigenen Vorlieben, Preis, Lieferzeit usw. Stellen Sie gleichzeitig sicher, dass der Austausch eines Elektromotors eines Armaturenherstellers durch einen Elektromotor eines anderen Herstellers nicht zu einer Fehlfunktion der Armatur oder einem Unfall führt.
Im letzten Jahrzehnt sind jedoch Elektromotoren verschiedener Hersteller auf dem heimischen Markt aufgetaucht, deren Marke genau die Marke des „originalen“ Elektromotors der JSC „Sibelelectromotor“ reproduziert. Man kann davon ausgehen, dass der Ursprung der Elektromotoren mit dem großen östlichen Nachbarn unseres Landes zusammenhängt. Ihr Preis ist etwas niedriger als der der traditionellen Hersteller, daher ist das Interesse der Unternehmen an ihnen verständlich.
Wenn Sie also einen Elektromotor zum Einbau in einen hergestellten Kran bestellen oder einen beschädigten Elektromotor an einem Kran durch einen funktionierenden ersetzen, können Sie einen Elektromotor eines unbekannten Herstellers erhalten, dessen E2nom sich vom Prototyp des Elektromotors unterscheidet.
Die Situation erinnert ein wenig an die frühen 90er Jahre, als mehrere gleichnamige Popgruppen gleichzeitig durch das Land tourten.
Erinnern wir uns noch einmal daran, dass das Verhältnis E2nom / I2nom der wichtigste Parameter eines Motors mit gewickeltem Rotor ist und sich auf die Wahl der Anlaufwiderstände, der Relais-Schütz-Ausrüstung und, wie oben erwähnt, auf den Zustand der Selbsterregung auswirkt Elektromotor.
Oftmals finden sich auf den Typenschildern geklonter Motoren jedoch überhaupt keine Rotordaten. Hier ist ein Beispiel:
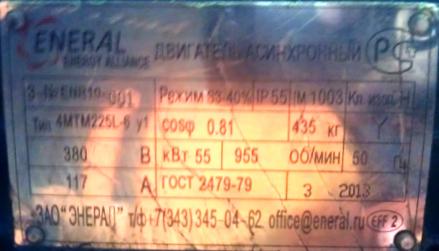
Reis. 3. Typenschild des Rotorkran-Asynchronmotors
Dieser Elektromotor hatte übrigens den «richtigen» Wert E2nom, nur musste dieser nun empirisch ermittelt werden.
In den Katalogen anderer Hersteller wird für den Elektromotor 4MTM225L6 der Wert E2nom = 340 V angegeben, d.h. der erregte Motor wurde zu einem unerregten. Der Einsatz eines solchen Elektromotors als Teil eines Elektroantriebs mit dynamischer Bremsung mit Selbsterregung hat einen Lastabfall und eine Trennung des Elektromotors mit mechanischer Zerstörung der Rotor- und Statorwicklungen zur Folge.
Genau dieses Bild beobachtete der Autor kürzlich in einem der ältesten russischen Maschinenbauunternehmen, wo ein neuer Brückenkran mit einem geklonten Elektromotor vom Typ 4MTM225L6 mit E2n = 340 V ausgeliefert wurde. Nur durch Glück passierte es nicht leiden. Darüber hinaus stellt der Besitzer des Krans den Motor drei (!) Mal nach dem Ausweichen wieder her.
Ein anderer Hersteller von Klon-Elektromotoren, der offenbar immer wieder ähnliche Unfälle erlebt, produziert nun zwei Elektromotoren unter derselben Marke (!). Einer mit E2nom = 340 V, der andere mit E2nom = 264 V ist im Katalog mit dem Hinweis „für Typ KB-Abgriffe“ angegeben, d. h. Turmdrehkrane.
Ein solcher Motor wird zwar am häufigsten bei Turmdrehkranen eingesetzt, wird aber auch bei Brückenkränen verbaut. So können Sie den Dialog zwischen Lieferant und Kunde hören: „Für welchen Kran benötigen Sie einen Motor?“ Für den Bodenbelag. Dann nehmen Sie dieses (E2nom = 340 V). » Und im Antrieb der elektrischen Hebezeuge befindet sich ein Bedienfeld mit selbsterregter dynamischer Bremsung. Das Ergebnis ist oben beschrieben.
Gleichzeitig behauptet niemand, dass diese Elektromotoren defekt oder unzuverlässig seien und nicht in Kränen eingesetzt werden könnten. Je mehr Auswahl auf dem Markt ist, desto besser. Wie man so schön sagt, gibt es mehr gute und unterschiedliche Motoren. Es ist nur so, dass ihre Marke den Verbraucher in die Irre führt, was gefährliche Folgen haben kann.
Um einen Elektromotor mit anderen Rotorparametern als dem Prototyp zu verwenden, müssen Sie:
-
Messen Sie E2nom, wenn der Rotorkreis offen und die Statorwicklung mit dem Netz verbunden ist;
-
Basierend auf E2nom-Messungen berechnen, wählen und bestellen Sie Ballastwiderstände;
-
Wählen Sie aus dem Katalog ein Bedienfeld für nicht erregte Elektromotoren aus und bestellen Sie es.
Oder Sie fragen einfach vor der Bestellung eines Motors, der durch seinen Preis überzeugt, nach dem Wert von E2nom und vereinbaren dies konkret im Vertrag. Dies schließt jedoch die Messung von E2nom bei der Eingangssteuerung des bestellten Motors nicht aus.
Zusammenfassend können wir folgende Schlussfolgerungen ziehen:
-
Beim elektrischen Antrieb von Haushaltswasserhähnen auf Basis von Phasenrotor-Elektromotoren wird häufig selbsterregtes dynamisches Bremsen eingesetzt. Zehntausende solcher Elektroantriebe sind im Einsatz. Sie werden noch ausgestellt.
-
Um im selbsterregten dynamischen Bremsmodus zu arbeiten, muss der Elektromotor ein bestimmtes E2nom/I2nom-Verhältnis haben.
-
Die Hauptbedingung für die Selbsterregung eines Elektromotors mit bewickeltem Rotor ist der Wert E2nom ≤ 300 V.
-
Der Einsatz von Elektromotoren mit E2nom > 300 V mit Schalttafeln, die für erregte Elektromotoren ausgelegt sind, kann zum Absinken der Last und zur Zerstörung des Elektromotors führen.