Regulierung der Winkelgeschwindigkeit des Induktionsmotors durch Änderung der Polpaarzahl des Stators
 Mit zunehmender Polpaarzahl nimmt die Winkelgeschwindigkeit des Feldes ab und damit auch die Rotorgeschwindigkeit des Induktionsmotors. Sonderausgabe Asynchronmotoren mit zwei Drehzahlen, deren Statorwicklungen aus separaten Teilen bestehen. Sie können auf zwei verschiedene Arten wieder verbunden werden: als Stern und Doppelstern (Abb. 1, a, b) oder als Dreieck und Doppelstern (Abb. 1, b, d).
Mit zunehmender Polpaarzahl nimmt die Winkelgeschwindigkeit des Feldes ab und damit auch die Rotorgeschwindigkeit des Induktionsmotors. Sonderausgabe Asynchronmotoren mit zwei Drehzahlen, deren Statorwicklungen aus separaten Teilen bestehen. Sie können auf zwei verschiedene Arten wieder verbunden werden: als Stern und Doppelstern (Abb. 1, a, b) oder als Dreieck und Doppelstern (Abb. 1, b, d).
Bei einem Doppelstern ist die Feldgeschwindigkeit immer doppelt so groß wie bei einem Stern oder Dreieck. Diese Schalter sind jedoch nicht gleich. Tatsache ist, dass das maximal zulässige Drehmoment im Dauerbetrieb durch den maximal zulässigen Phasenstrom entsprechend den Erwärmungsbedingungen der Wicklungen bestimmt wird und vom Statorfluss proportional zum Quadrat der Phasenspannung abhängt. Von den gleichen Werten hängt auch die langfristig zulässige Leistung ab.
Wenn Sie die Wicklungen des Motors von Stern auf Doppelstern umschalten, ändert sich die Phasenspannung nicht, und beim Umschalten von Dreieck auf Doppelstern verringert sie sich um das √3-fache. Bei einem Doppelstern kann der Strom in jeder Phase jedoch doppelt so hoch sein wie bei einem Stern oder Dreieck, da jede Phase aus zwei parallelen Zweigen besteht. Wir stellen dann fest, dass sich Geschwindigkeit und Leistung verdoppeln, wenn man von einem Stern zu einem Doppelstern übergeht, sodass das kritische Moment konstant bleibt (M = P /ω= const).
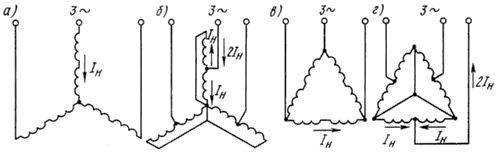
Reis. 1. Schemata zum Anschluss der Statorwicklungen eines Asynchronmotors in Stern (a) und Doppelstern (b), in Dreiecken (c) und Doppelstern (d)
Wenn Sie von Dreieck zu Doppelstern wechseln, verringert sich die Phasenspannung um das √3-fache. Dann erhöht sich die Leistung auch bei Zweiphasenstrom nur um das 2 /√3 = l, 18-fache und kann als unverändert betrachtet werden. In diesem Fall ändert sich die Leistung fast, wenn die Winkelgeschwindigkeit um den Faktor zwei zunimmt, und das Moment nimmt ungefähr um den Faktor zwei ab. Daher wird empfohlen, für den Antrieb von Hebevorrichtungen Motoren zu verwenden, deren Wicklungen in Sternschaltung geschaltet sind, und für den Antrieb von Zerspanungsmaschinen Motoren zu verwenden, deren Statorwicklungen in Dreieck geschaltet sind.

Reis. 2. Passdaten eines mehrstufigen Motors
Es gibt asynchrone Elektromotoren mit zwei voneinander isolierten Statorwicklungen, eine davon ohne Schaltung und die zweite mit Schaltpolen. Danach werden Dreigangmotoren erhalten. Sind beide Wicklungen polumschaltbar, handelt es sich um vierstufige Motoren. Teilweise werden zwei isolierte Wicklungen mit unterschiedlicher Polpaarzahl verwendet. pp ohne Umschalten.Beispielsweise gilt bei Aufzugsmotoren p1 = 3 und p2 = 12, was der synchronen Drehzahl von 1000 und 250 U/min entspricht.
In Abb. 3a zeigt die mechanischen Eigenschaften für einen zweistufigen Stern-Doppelstern-Motor und FIG. 3, b – beim Übergang von einem Dreieck zu einem Doppelstern.
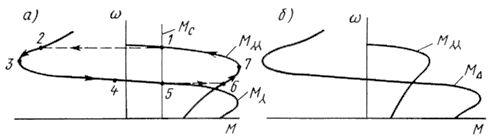
Reis. 3... Mechanische Eigenschaften von Asynchron-Elektromotoren beim Umschalten von Stern auf Doppelstern (a) und von Dreieck auf Doppelstern (b)
Bei einem schnellen Wechsel von einer höheren Geschwindigkeit zu einer niedrigeren Geschwindigkeit läuft der Motor eine Zeit lang. Federungsmodus… Wenn nämlich die Geschwindigkeit des Feldes abnimmt, dann dreht sich der Rotor im ersten Moment mit der gleichen Geschwindigkeit weiter.
Der Motor wechselt augenblicklich von einer Charakteristik zur anderen, d.h. von Punkt 1 nach Punkt 2 (Abb. 3, a). Es folgt die regenerative Bremsung (Punkte 2, 3, 4), ab Punkt 5 beginnt sie im Dauerbetrieb zu arbeiten. Schaltet man von einer niedrigeren auf eine höhere Geschwindigkeit um, bewegt sich der Motor augenblicklich von Punkt 5 zu Punkt b, dann folgt die Beschleunigung (Punkte 6 und 7) und bei Punkt 1 stellt sich wieder ein Gleichgewichtszustand ein.