Die Hauptbetriebsarten des Elektromotors im elektrischen Antriebssystem
 Ein vollständiges Bild des Betriebs eines beliebigen elektrischen Antriebsmotors ergibt sich aus der Untersuchung der mechanischen Eigenschaften, die in vier Quadranten eines rechtwinkligen Koordinatensystems aufgetragen sind (Abb. 1). Diese Eigenschaften entsprechen zwei Hauptbetriebsarten des Elektromotors: Motor und Bremse.
Ein vollständiges Bild des Betriebs eines beliebigen elektrischen Antriebsmotors ergibt sich aus der Untersuchung der mechanischen Eigenschaften, die in vier Quadranten eines rechtwinkligen Koordinatensystems aufgetragen sind (Abb. 1). Diese Eigenschaften entsprechen zwei Hauptbetriebsarten des Elektromotors: Motor und Bremse.
Als Motorbetrieb bezeichnet man die Betriebsart des Elektromotors, bei der dieser den Arbeitsmechanismus antreibt. Im Bremsmodus ist die Antriebskraft der Mechanismus und der Motor gleicht diese Kraft entweder aus oder bremst ab.
Je nach Betriebsart ändern sich die Richtung des Drehmoments und die Drehzahl. Für die positiven Richtungen der Drehzahl und des Drehmoments des Elektromotors gilt:
1) bei vertikaler Bewegung – die Drehrichtung des Elektromotors beim Heben der Last und das Drehmoment für den Fall, dass der Elektromotor zum Heben der Last arbeitet,
2) bei horizontaler Bewegung, zum Beispiel bei verschiedenen Wagentypen, einer der Bewegungsrichtungen des Mechanismus (vorwärts, rechts) und dem dieser Bewegung entsprechenden Drehmoment des Motors. Die vom Motor überwundenen Momente sind in diesem Fall negativ.
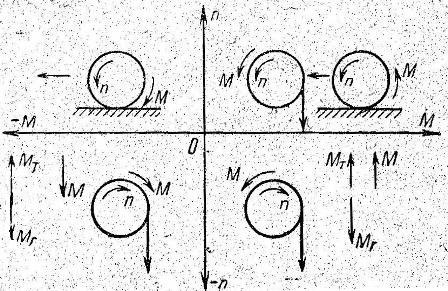
Reis. 1. Darstellung der Betriebsarten des Antriebsmotors in rechtwinkligen Koordinatenachsen
Wie Sie aus Abb. sehen können. In 1 arbeitet der Elektromotor im ersten Quadranten des Koordinatensystems im Motormodus (z. B. beim Heben einer Last oder beim Bewegen eines Wagens). Der zweite Quadrant entspricht der Funktionsweise des Elektromotors bei horizontaler Bewegung des Mechanismus mit Bremsung, wenn der Elektromotor ein Bremsmoment erzeugt, das der Bewegung der Welle des Mechanismus entgegenwirkt.
Der dritte Quadrant betrachtet den Fall, dass der Elektromotor beim Absenken bei leichter Last arbeitet, wenn das Lastmoment das Reibungsmoment im Mechanismus und im Getriebe nicht überwinden kann und der Elektromotor beim Absenken der Last hilft, indem er ein Motordrehmoment entwickelt, das der Richtung entspricht Bewegung der Last, jedoch mit entgegengesetztem Vorzeichen zum Moment, in dem die Last angehoben wird.
Der vierte Quadrant schließlich bezieht sich auf den Fall der Motordrehung unter dem Einfluss eines externen Drehmoments. Dieser Modus kann beispielsweise beim Absenken schwerer Lasten auftreten, wenn der Elektromotor ein Bremsmoment entwickelt, das die Last hält und verhindert, dass sich die Geschwindigkeit des Hubmechanismus erhöht. In diesem Fall hat das Motordrehmoment ein positives Vorzeichen, da es in die gleiche Richtung gerichtet ist wie beim Heben.