Thyristor-Elektroantrieb
 In der Industrie werden häufig Aktoren mit gesteuerten Halbleiterventilen – Thyristoren – eingesetzt. Thyristoren werden für Ströme bis Hunderte Ampere und Spannungen bis 1000 Volt oder mehr hergestellt. Sie zeichnen sich durch hohe Effizienz, relativ geringe Größe, hohe Geschwindigkeit und die Fähigkeit aus, in einem weiten Umgebungstemperaturbereich (von -60 bis +60 °C) zu arbeiten.
In der Industrie werden häufig Aktoren mit gesteuerten Halbleiterventilen – Thyristoren – eingesetzt. Thyristoren werden für Ströme bis Hunderte Ampere und Spannungen bis 1000 Volt oder mehr hergestellt. Sie zeichnen sich durch hohe Effizienz, relativ geringe Größe, hohe Geschwindigkeit und die Fähigkeit aus, in einem weiten Umgebungstemperaturbereich (von -60 bis +60 °C) zu arbeiten.
Der Thyristor ist kein vollständig steuerbares Gerät, das durch Anlegen des entsprechenden Potentials an die Steuerelektrode eingeschaltet wird und nur durch erzwungene Unterbrechung des Stromkreises aufgrund der Unterbrechungsspannung, seines natürlichen Übergangs durch Null oder der Bereitstellung einer Dämpfung ausgeschaltet wird Spannung mit umgekehrtem Vorzeichen. Durch Ändern des Zeitpunkts der Zufuhr der Steuerspannung (deren Verzögerung) können Sie den Durchschnittswert der gleichgerichteten Spannung und damit die Drehzahl des Motors anpassen.
Der Mittelwert der gleichgerichteten Spannung ohne Regelung wird hauptsächlich durch den Schaltkreis des Thyristorwandlers bestimmt. Wandlerschaltungen werden in zwei Klassen unterteilt: Null-Pull-Schaltungen und überbrückte Schaltungen.
In Anlagen mittlerer und hoher Leistung werden hauptsächlich Brückenkonverterschaltungen verwendet, und zwar hauptsächlich aus zwei Gründen:
-
weniger Spannung an jedem der Thyristoren,
-
Fehlen einer konstanten Stromkomponente, die durch die Transformatorwicklungen fließt.
Konverterschaltungen können sich auch in der Anzahl der Phasen unterscheiden: von einer bei Anlagen mit geringer Leistung bis zu 12 bis 24 bei leistungsstarken Konvertern.
Alle Varianten von Thyristorwandlern haben neben positiven Eigenschaften wie geringe Trägheit, Fehlen rotierender Elemente und kleinerer Größe (im Vergleich zu elektromechanischen Wandlern) eine Reihe von Nachteilen:
1. Harte Verbindung zum Netzwerk: Alle Spannungsschwankungen im Netzwerk werden direkt auf das Antriebssystem übertragen und die Belastung steigt, die Motorachsen werden sofort auf das Netzwerk übertragen und verursachen Stromstöße.
2. Niedriger Leistungsfaktor beim Herunterregeln der Spannung.
3. Erzeugung höherer Harmonischer, Belastung des Stromnetzes.
Die mechanischen Eigenschaften eines von einem Thyristorwandler angetriebenen Motors werden durch die an den Anker angelegte Spannung und die Art ihrer Änderung mit der Last bestimmt, d. h. durch die äußeren Eigenschaften des Wandlers und die Parameter des Wandlers und des Motors.
Das Gerät und das Funktionsprinzip des Thyristors
Ein Thyristor (Abb. 1, a) ist ein vierschichtiger Siliziumhalbleiter mit zwei pn-Übergängen und einem n-p-Übergang. Die Größe des Stroms Az, der unter Einwirkung der Anodenspannung Ua durch den Thyristor fließt, hängt von dem Strom Az ab, der während der Ansteuerung unter Einwirkung der Steuerspannung Uy durch die Steuerelektrode fließt.
Wenn kein Steuerstrom vorhanden ist (Azy = 0), steigt mit zunehmender Spannung U der Strom A im Stromkreis des Verbrauchers P an, bleibt jedoch auf einem sehr kleinen Wert (Abb. 1, b).

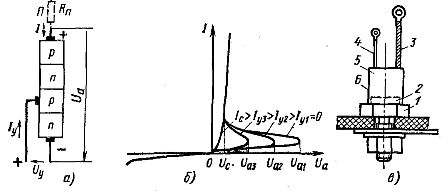
Reis. 1. Blockschaltbild (a), Strom-Spannungs-Kennlinie (b) und Aufbau (c) des Thyristors
Zu diesem Zeitpunkt weist der in Sperrrichtung eingeschaltete NP-Übergang einen hohen Widerstand auf. Bei einem bestimmten Wert Ua1 der Anodenspannung, Öffnungs-, Zünd- oder Schaltspannung genannt, kommt es zu einem Lawinendurchbruch der Sperrschicht. Ihr Widerstand wird klein und die Stromstärke steigt auf einen Wert an, der nach dem Ohmschen Gesetz durch den Widerstand Rp bestimmt wird des Benutzers P.
Mit zunehmendem Strom Iу nimmt die Spannung Ua ab. Der Strom Iu, bei dem die Spannung Ua den niedrigsten Wert erreicht, wird als Strom I mit Korrektur bezeichnet.
Der Thyristor schließt, wenn die Spannung Ua wegfällt oder ihr Vorzeichen wechselt. Der Nennstrom I des Thyristors ist der größte Mittelwert des in Durchlassrichtung fließenden Stroms, der keine unzulässige Überhitzung verursacht.
Als Nennspannung Un bezeichnet man die höchstzulässige Amplitudenspannung, bei der die gegebene Zuverlässigkeit des Gerätes gewährleistet ist.
Der Spannungsabfall ΔUnerzeugt durch den Nennstrom wird als Nennspannungsabfall bezeichnet (üblicherweise ΔUn = 1 – 2 V).
Der Wert der Stromstärke Ic der Korrektur schwankt innerhalb der Grenzen von 0,1 – 0,4 A bei einer Spannung Uc von 6 – 8 V.
Der Thyristor öffnet zuverlässig mit einer Impulsdauer von 20 – 30 μs. Der Abstand zwischen den Impulsen sollte nicht weniger als 100 μs betragen. Wenn die Spannung Ua auf Null sinkt, schaltet der Thyristor ab.
Der äußere Aufbau des Thyristors ist in Abb. dargestellt.1, v… Kupferbasierte 1 sechzehnte Silizium-Vierschichtstruktur 2 mit Gewindeschwanz, mit negativer Leistung 3 und Steuerung von 4 Ausgängen. Die Siliziumstruktur wird durch ein zylindrisches Metallgehäuse 5 geschützt. Der Isolator ist im Gehäuse 6 befestigt. Ein Gewinde im Sockel 1 dient zum Einbau eines Thyristors und zum Anschluss der Anodenspannungsquelle an den Pluspol.
Mit zunehmender Spannung Ua nimmt der zum Öffnen des Thyristors erforderliche Steuerstrom ab (siehe Abb. 1, b). Der Steueröffnungsstrom ist proportional zur Steueröffnungsspannung uyo.
Ändert sich Uа nach dem Sinusgesetz (Abb. 2), dann können die erforderliche Spannung und die 0-Öffnung durch eine gepunktete Linie dargestellt werden. Ist die anliegende Steuerspannung Uy1 konstant und liegt ihr Wert unter dem Minimalwert der Spannung uuo, so öffnet der Thyristor nicht.
Wird die Steuerspannung auf den Wert Uy2 erhöht, öffnet der Thyristor, sobald die Spannung Uy2 größer als die Spannung uyo wird. Durch Ändern des uу-Wertes können Sie den Öffnungswinkel des Thyristors im Bereich von 0 bis 90° ändern.
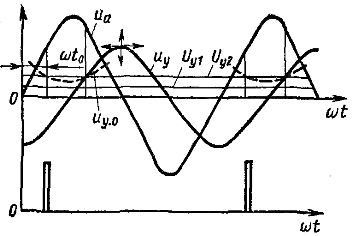
Reis. 2. Thyristorsteuerung
Zum Öffnen des Thyristors bei Winkeln über 90° wird eine variable Steuerspannung uy verwendet, die sich beispielsweise sinusförmig ändert. Bei einer Spannung, die dem Schnittpunkt der Sinuswelle dieser Spannung mit der gepunkteten Kurve uuo = f (ωt) entspricht, öffnet der Tiristor.
Durch horizontales Verschieben der Sinuskurve uyo nach rechts oder links können Sie den Öffnungswinkel ωt0 des Thyristors ändern. Diese Öffnungswinkelsteuerung wird als horizontal bezeichnet. Dies erfolgt über spezielle Phasenschalter.
Indem Sie dieselbe Sinuswelle vertikal nach oben oder unten bewegen, können Sie auch den Öffnungswinkel ändern. Ein solches Management wird als vertikal bezeichnet. Fügen Sie in diesem Fall bei variabler Spannungsregelung tyy algebraisch eine konstante Spannung hinzu, beispielsweise die Spannung Uy1... Der Öffnungswinkel wird durch Änderung der Größe dieser Spannung eingestellt.
Nach dem Öffnen bleibt der Thyristor bis zum Ende der positiven Halbwelle geöffnet und die Steuerspannung beeinträchtigt seinen Betrieb nicht. Dies ermöglicht auch die Anwendung einer Impulssteuerung durch periodisches Anlegen positiver Steuerspannungsimpulse zum richtigen Zeitpunkt (Abb. 2 unten). Dies erhöht die Übersichtlichkeit der Steuerung.
Durch die Veränderung des Öffnungswinkels des Thyristors auf die eine oder andere Weise können Spannungsimpulse unterschiedlicher Form an den Benutzer angelegt werden. Dadurch ändert sich der Wert der durchschnittlichen Spannung an den Endgeräten des Benutzers.
Zur Ansteuerung von Thyristoren werden verschiedene Geräte eingesetzt. In dem in Abb. gezeigten Schema. Gemäß Fig. 3 liegt die Netzwechselspannung an der Primärwicklung des Transformators Tp1 an.
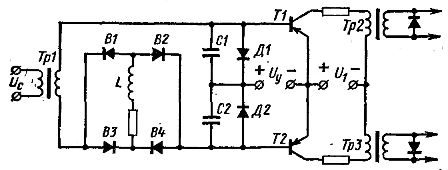
Reis. 3. Thyristor-Steuerkreis
Im Sekundärkreis dieses Transformators ist ein Vollwellengleichrichter B enthalten.1, B2, B3, B4 mit einer signifikanten Induktivität L im Gleichstromkreis. Der praktische Wellenstrom wird praktisch eliminiert. Ein solcher Gleichstrom kann jedoch nur durch Vollwellengleichrichtung eines Wechselstroms mit der in Abb. gezeigten Form erhalten werden. 4, a.
Somit ist in diesem Fall der Gleichrichter B1, B2, B3, B4 (siehe Abb. 3) ein Wandler in Form von Wechselstrom. In diesem Schema wechseln sich die Kondensatoren C1 und C2 in Reihe mit rechteckigen Stromimpulsen ab (Abb. 4, a).In diesem Fall entsteht an den Platten der Kondensatoren C1 und C2 (Abb. 4, b) eine transversale Sägezahnspannung, die an die Basen der Transistoren T1 und T2 angelegt wird (siehe Abb. 3).
Diese Spannung wird Referenzspannung genannt. Die Gleichspannung Uy wirkt auch im Hauptstromkreis jedes Transistors. Wenn die Sägespannung Null ist, erzeugt die Spannung Uy positive Potentiale an den Basen beider Transistoren. Jeder Transistor öffnet mit einem Basisstrom auf negativem Basispotential.
Dies geschieht, wenn sich herausstellt, dass die negativen Werte der Sägereferenzspannung größer als Uy sind (Abb. 4, b). Diese Bedingung ist je nach Wert von Uy bei unterschiedlichen Werten des Phasenwinkels erfüllt. In diesem Fall öffnet der Transistor je nach Höhe der Spannung Uy unterschiedlich lange.
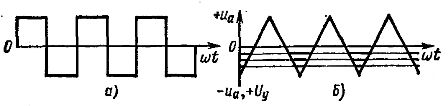
Reis. 4. Diagramme der Thyristor-Steuerspannungen
Wenn der eine oder andere Transistor öffnet, fließt ein rechteckiger Stromimpuls durch die Primärwicklung des Transformators Tr2 oder Tr3 (siehe Abb. 3). Beim Durchlaufen der Vorderflanke dieses Impulses entsteht in der Sekundärwicklung ein Spannungsimpuls, der an die Steuerelektrode des Thyristors angelegt wird.
Beim Durchlaufen der Rückseite des Stromimpulses durch die Sekundärwicklung entsteht ein Spannungsimpuls entgegengesetzter Polarität. Dieser Impuls wird durch eine Halbleiterdiode geschlossen, die die Sekundärwicklung umgeht und nicht an den Thyristor angelegt wird.
Bei der Ansteuerung der Thyristoren (siehe Abb. 3) mit zwei Transformatoren werden zwei um 180° phasenverschobene Impulse erzeugt.
Thyristor-Motorsteuerungssysteme
Bei Thyristorsteuerungen für Gleichstrommotoren wird eine Änderung der Ankergleichspannung des Motors zur Steuerung seiner Drehzahl genutzt. In diesen Fällen werden üblicherweise mehrphasige Gleichrichtungsschemata verwendet.
In Abb. 5, und das einfachste Diagramm dieser Art ist mit einer durchgezogenen Linie dargestellt. Bei dieser Schaltung ist jeder der Thyristoren T1, T2, T3 in Reihe mit der Sekundärwicklung des Transformators und dem Motoranker geschaltet; NS. usw. c. Die Sekundärwicklungen sind phasenverschoben. Daher werden bei der Steuerung des Öffnungswinkels der Thyristoren relativ zueinander phasenverschobene Spannungsimpulse an den Motoranker angelegt.
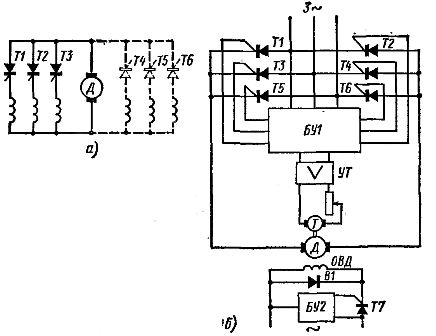
Reis. 5. Thyristor-Ansteuerschaltungen
In einem mehrphasigen Stromkreis können je nach gewähltem Zündwinkel der Thyristoren intermittierende und kontinuierliche Ströme durch den Anker des Motors fließen. Ein umkehrbarer elektrischer Antrieb (Abb. 5, a, die gesamte Schaltung) verwendet zwei Thyristorsätze: T1, T2, T3 und T4, T5, T6.
Durch das Öffnen der Thyristoren einer bestimmten Gruppe ändern sie die Stromrichtung im Anker des Elektromotors und dementsprechend die Drehrichtung.
Das Reversieren des Motors kann auch durch eine Änderung der Stromrichtung in der Feldwicklung des Motors erreicht werden. Eine solche Umkehrung wird in Fällen verwendet, in denen keine hohe Drehzahl erforderlich ist, da die Feldwicklung im Vergleich zur Ankerwicklung eine sehr hohe Induktivität aufweist. Ein solcher Umkehrhub wird häufig für Thyristorantriebe der Hauptbewegung von Zerspanungsmaschinen verwendet.
Der zweite Satz Thyristoren ermöglicht auch die Durchführung von Bremsmodi, die eine Änderung der Stromrichtung im Anker des Elektromotors erfordern.Thyristoren in den betrachteten Antriebskreisen dienen zum Ein- und Ausschalten des Motors sowie zur Begrenzung der Anlauf- und Bremsströme, wodurch der Einsatz von Schützen sowie Anlauf- und Bremswiderständen entfällt.
In Gleichstrom-Thyristor-Ansteuerschaltungen sind Leistungstransformatoren unerwünscht. Sie erhöhen die Größe und die Kosten der Installation, weshalb häufig die in Abb. gezeigte Schaltung verwendet wird. 5 B.
In dieser Schaltung wird die Zündung des Thyristors vom Steuergerät BU1 gesteuert. Es ist an ein Drehstromnetz angeschlossen und liefert so Strom und passt die Phasen der Steuerimpulse an die Anodenspannung der Thyristoren an.
Ein Thyristorantrieb verwendet normalerweise eine Motorgeschwindigkeitsrückführung. Dabei kommen ein Tachogenerator T und ein zwischengeschalteter Transistorverstärker UT zum Einsatz. Auch E-Mail-Feedback kommt zum Einsatz. usw. c. Elektromotor, realisiert durch gleichzeitige Wirkung einer negativen Rückkopplung auf die Spannung und einer positiven Rückkopplung auf den Ankerstrom.
Zur Einstellung des Erregerstroms wird ein Thyristor T7 mit einer Steuereinheit BU2 verwendet. Bei negativen Halbwellen der Anodenspannung, wenn der Thyristor T7 keinen Strom durchlässt, fließt der Strom im OVD aufgrund von z. B. weiter. usw. c. Selbstinduktion, Schließen durch das Bypassventil B1.
Thyristor-Elektroantriebe mit Pulsweitensteuerung
Bei den betrachteten Thyristorantrieben wird der Motor durch Spannungsimpulse mit einer Frequenz von 50 Hz angetrieben. Um die Reaktionsgeschwindigkeit zu erhöhen, empfiehlt es sich, die Pulsfrequenz zu erhöhen.Dies wird bei Thyristorantrieben mit Pulsweitensteuerung erreicht, bei denen rechteckförmige Gleichstromimpulse unterschiedlicher Dauer (Breite) mit einer Frequenz von bis zu 2-5 kHz durch den Motoranker laufen. Zusätzlich zur schnellen Reaktion bietet eine solche Steuerung große Motorgeschwindigkeitsregelbereiche und eine höhere Energieleistung.
Bei der Pulsweitensteuerung wird der Motor von einem ungesteuerten Gleichrichter gespeist und der in Reihe mit dem Anker geschaltete Thyristor wird periodisch geschlossen und geöffnet. In diesem Fall durchlaufen die Gleichstromimpulse den Ankerkreis des Motors. Eine Änderung der Dauer (Breite) dieser Impulse führt zu einer Änderung der Drehzahl des Elektromotors.
Da der Thyristor in diesem Fall mit konstanter Spannung arbeitet, werden zu seiner Schließung spezielle Schaltkreise verwendet. Eines der einfachsten Pulsweitensteuerungsschemata ist in Abb. dargestellt. 6.
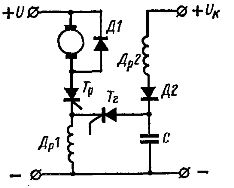
Reis. 6. Thyristor-Elektroantrieb mit Impulsbreitensteuerung
In dieser Schaltung wird der Thyristor Tr ausgeschaltet, wenn der Dämpfungsthyristor Tr eingeschaltet wird. Wenn dieser Thyristor öffnet, entlädt sich der geladene Kondensator C Gaspedal Dr1, wodurch ein signifikanter e entsteht. usw. c. In diesem Fall entsteht an den Enden der Drossel eine Spannung, die größer als die Spannung U des Gleichrichters ist und auf diesen gerichtet ist.
Über einen Gleichrichter und eine Paralleldiode D1 wird diese Spannung an den Thyristor Tr angelegt und bewirkt, dass dieser abschaltet. Beim Abschalten des Thyristors wird der Kondensator C wieder auf die Schaltspannung Uc > U aufgeladen.
Aufgrund der erhöhten Frequenz der Stromimpulse und der Trägheit des Motorankers spiegelt sich die Impulsnatur der Stromversorgung praktisch nicht in der Gleichmäßigkeit der Motordrehung wider. Die Thyristoren Tr und Tr werden durch eine spezielle Phasenschieberschaltung geöffnet, die eine Änderung der Impulsbreite ermöglicht.
Die Elektroindustrie produziert verschiedene Modifikationen von vollständig geregelten Thyristor-Gleichstromantrieben. Darunter sind Antriebe mit Drehzahlregelbereichen 1:20; 1: 200; 1:2000 durch Spannungsänderung, irreversible und reversible Antriebe, mit und ohne elektrische Bremse. Die Steuerung erfolgt über Transistor-Phasenimpulsgeräte. Antriebe nutzen eine negative Rückmeldung der Motordrehzahl und des E-Zählers usw. mit
Die Vorteile von Thyristorantrieben sind hohe Energieeigenschaften, geringe Größe und Gewicht, das Fehlen jeglicher rotierender Maschinen außer einem Elektromotor, hohe Geschwindigkeit und ständige Arbeitsbereitschaft. Der Hauptnachteil von Thyristorantrieben sind ihre immer noch hohen Kosten, die deutlich übersteigen die Kosten für Antriebe mit elektrischer Maschine und magnetischen Verstärkern.
Derzeit gibt es einen stetigen Trend zum weit verbreiteten Ersatz von Thyristor-Gleichstromantrieben durch AC-Antriebe mit variabler Frequenz.