Mechanische Eigenschaften elektrischer Antriebe
 Die Wahl des Elektroantriebs richtet sich nach den Anforderungen der Arbeitsmaschine. Der elektrische Antrieb muss sicherstellen, dass die Arbeitsmaschine in allen möglichen Betriebsarten die vorgegebene Technik ausführt: Starten, Lastaufnahme und -abgabe, Stoppen, Geschwindigkeitsänderung, konstante Last. Die Art dieser Modi wird hauptsächlich durch die mechanischen Eigenschaften des Motors und der Arbeitsmaschine bestimmt... Eines der Hauptkriterien für die Bewertung der mechanischen Eigenschaften sowohl des Motors als auch der Arbeitsmaschine sind ihre mechanischen Eigenschaften.
Die Wahl des Elektroantriebs richtet sich nach den Anforderungen der Arbeitsmaschine. Der elektrische Antrieb muss sicherstellen, dass die Arbeitsmaschine in allen möglichen Betriebsarten die vorgegebene Technik ausführt: Starten, Lastaufnahme und -abgabe, Stoppen, Geschwindigkeitsänderung, konstante Last. Die Art dieser Modi wird hauptsächlich durch die mechanischen Eigenschaften des Motors und der Arbeitsmaschine bestimmt... Eines der Hauptkriterien für die Bewertung der mechanischen Eigenschaften sowohl des Motors als auch der Arbeitsmaschine sind ihre mechanischen Eigenschaften.
Mechanische Eigenschaften von Elektromotoren
Die mechanische Eigenschaft des Elektromotors ist die Abhängigkeit der Drehzahl der Welle vom vom Motor entwickelten Drehmoment ω=φ(Md) oder n = e(Md), wobei ω die Winkelgeschwindigkeit der Welle, rad / Sek., n – Drehzahl der Welle, U/min
Die mechanische Eigenschaft des Motors wird als natürliche Abhängigkeit n = f (M) bezeichnet und erhält man mit den Nennparametern des Stromnetzes, dem normalen Anschlussschema und ohne zusätzliche Widerstände im Stromkreis.
Wenn zusätzliche Widerstände vorhanden sind oder der Motor aus einem Netz mit einer anderen Spannung oder Frequenz als der Nennspannung gespeist wird, werden die mechanischen Eigenschaften des Motors als künstlich bezeichnet. Offensichtlich hat der Motor unendlich viele künstliche Eigenschaften und nur solche eine natürliche.
Die Drehzahl der meisten Elektromotoren nimmt unter Last mit zunehmendem Drehmoment ab. Die Kennlinie heißt in diesem Fall fallend... Der Grad der Änderung der Motordrehzahl bei einer Drehmomentänderung wird durch die sogenannte Steifigkeit der mechanischen Kennlinien abgeschätzt, die durch das Verhältnis α = ΔM / Δω oder α = ΔM bestimmt wird / Δн
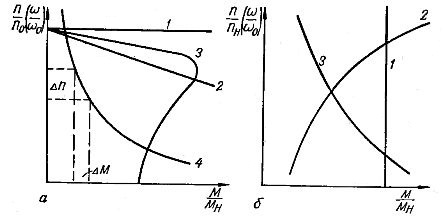
Reis. 1. Verschiedene Arten mechanischer Eigenschaften: a – Elektromotoren, b – Produktionsmaschinen.
Die Werte der Momentenänderung und der Fallgeschwindigkeit bei der Bestimmung der Steifigkeit werden üblicherweise in relativen Einheiten angenommen. Dadurch ist es möglich, die Eigenschaften verschiedener Motortypen zu vergleichen.
Je nach Steifigkeitsgrad werden alle mechanischen Eigenschaften von Motoren in folgende Gruppen eingeteilt.
1. Absolut schwere Leistung mit Steifigkeitswert α = ∞… Synchronmotoren haben solche mechanischen Eigenschaften (Kurve 1, Abb. 1, a) mit einer streng konstanten Drehzahl.
2. Solide Kennlinie mit relativ geringem Drehzahlabfall bei steigendem Drehmoment und α = 40 — 10.Diese Gruppe umfasst die natürlichen Eigenschaften von Gleichstrommotoren mit unabhängiger Erregung (Kurve 2) und die Eigenschaften von Induktionsmotoren im linearen Abschnitt (Kurve 3).
3. Weiche mechanische Eigenschaften mit einem großen relativen Drehzahlabfall bei zunehmendem Drehmoment und mit Steifigkeiten bis zu α = 10. Solche Eigenschaften haben Gleichstrommotoren mit Reihenerregung (Kurve 4), unabhängig erregte Motoren mit hohem Ankerwiderstand und Asynchronmotoren mit zusätzlichen Widerständen im Rotorkreis.
Beim Betrieb des Elektroantriebs muss der Motor ein bestimmtes Moment entwickeln, um den Widerstand der Arbeitsmaschine zu überwinden. Daher ist es bei der Auswahl eines Motors zunächst erforderlich, die Übereinstimmung der Eigenschaften des Motors und der Arbeitsmaschine zu ermitteln.

Mechanische Eigenschaften von Arbeitsmaschinen
Die mechanische Eigenschaft der Arbeitsmaschine ist die Abhängigkeit des statischen Widerstandsmoments der Maschine von der Drehzahl der Antriebswelle. Zur Vereinfachung der Gelenkkonstruktion wird diese Abhängigkeit normalerweise auf die gleiche Weise wie die Motorcharakteristik in der Form ω=φ(Ms -Ms) oder n =e(Miss) ausgedrückt.
Das statische Widerstandsmoment Ms, kurz statisches Moment, ist das Widerstandsmoment, das die Maschine im statischen (stationären) Modus auf die Antriebswelle erzeugt, wenn sich die Geschwindigkeit nicht ändert.
Die mechanischen Eigenschaften der Maschine können empirisch oder rechnerisch ermittelt werden, wenn die Verteilung der statischen Kräfte oder Momente auf die Elemente des kinematischen Schemas bekannt ist.Die statischen Momente der Maschinen können nicht nur von der Drehzahl, sondern auch von anderen Größen abhängen, daher ist es bei der praktischen Berechnung der Elektroantriebe notwendig, jeden Fall separat zu betrachten.
Die statischen Momente verschiedener Arbeitsmaschinen werden nach der Art ihrer Geschwindigkeitsabhängigkeit (mechanische Eigenschaften) in Gruppen eingeteilt. Die in der Praxis am häufigsten vorkommenden sind die folgenden.
1. Das statische Moment hängt wenig oder praktisch nicht von der Geschwindigkeit ab (Kurve 1, Abb. 2, b). Solche Eigenschaften haben Hebemechanismen, Kräne, Winden, Hebezeuge sowie Förderbänder unter Dauerlast.
2. Das statische Moment der Maschine steigt proportional zum Quadrat der Geschwindigkeit (Kurve 2). Diese Eigenschaft, die für Axialventilatoren charakteristisch ist, wird als Eigenschaft des Ventilators bezeichnet und analytisch in Form der Formel dargestellt: Mc = Mo + kn2, wobei Mo das anfängliche statische Moment ist, das meist auf Reibungskräfte zurückzuführen ist, die normalerweise nicht auftreten hängen von der Geschwindigkeit ab, k ist der experimentelle Koeffizient. Neben Ventilatoren verfügen auch Kreisel- und Wirbelpumpen, Abscheider, Zentrifugen, Propeller, Turbolader und rotierende Trommelleiträder über Ventilatoreigenschaften.
3. Das statische Moment nimmt mit zunehmender Geschwindigkeit ab (Kurve 3). Diese Gruppe umfasst die Eigenschaften einiger Fördermechanismen und einiger Metallschneidemaschinen.
4. Das statische Moment variiert mehrdeutig mit der Geschwindigkeit, mit einem scharfen Übergang aufgrund der Besonderheiten des technologischen Prozesses. Die Merkmale dieser Gruppe sind Maschinen, die häufig mit großen Überlastungen arbeiten, die manchmal zu einem völligen Stillstand führen.Zum Beispiel ein Schaufelmechanismus für einen Einschaufelbagger, ein Kratzförderer, der unter Blockierung der transportierten Masse arbeitet, Brecher und andere Maschinen.
Zusätzlich zu den aufgeführten gibt es in der Praxis andere Arten mechanischer Eigenschaften von Maschinen, beispielsweise Kolbenpumpen und Kompressoren, deren statische Momente vom Weg abhängen.