Statische Belastungen der Motoren der Hauptkranmechanismen
Die Leistung und das Drehmoment der Motorwelle des Kranaufzugs im statischen Lasthubmodus können nach den Formeln berechnet werden
wobei P die Motorwellenleistung in kW ist; G ist die Kraft, die zum Heben der Last erforderlich ist, N; G0 – Hubkraft der Greifvorrichtung, N; M ist das Motorwellenmoment, Nm; v ist die Geschwindigkeit beim Heben der Last, m / s; D ist der Durchmesser der Schleppwindentrommel, m; η – Effizienz des Hebemechanismus; i ist das Übersetzungsverhältnis von Getriebe und Kettenzug.
Im Abstiegsmodus entwickelt der Kranmotor eine Leistung, die der Differenz zwischen der Reibungsleistung Ptr und der Leistung aufgrund der Gewichtseinwirkung der absteigenden Last Pgr entspricht:
Beim Absenken mittlerer und schwerer Lasten wird Energie von der Getriebewelle zum Motor geleitet, da Pgr >> Ptr (Bremse lösen). In diesem Fall wird die Motorwellenleistung, kW, durch die Formel ausgedrückt

Beim Absenken leichter Lasten oder eines leeren Hakens kann es vorkommen, dass Pgr < Ptr.In diesem Fall arbeitet der Motor mit einem Bewegungsmoment (Leistungsabfall) und entwickelt Leistung, kW,

Anhand der angegebenen Formeln ist es möglich, die Leistung des Kranmotors bei jeder Belastung des Hakens zu ermitteln. Bei der Berechnung ist zu berücksichtigen, dass die Effizienz des Mechanismus von seiner Belastung abhängt (Abb. 1).
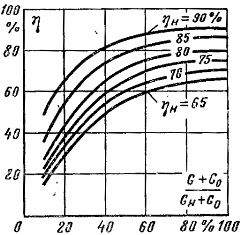
Reis. 1. Abhängigkeit der Effizienz des Mechanismus von der Last.
Die Leistung und das Drehmoment an der Welle der Motoren der horizontalen Bewegungsmechanismen des Krans im statischen Betriebsmodus können durch die Formeln bestimmt werden

wobei P die Motorwellenleistung des Kranbewegungsmechanismus ist, kW; M ist das Motorwellenmoment des Bewegungsmechanismus, Nm; G – Gewicht der transportierten Ladung, N; G1 – Eigengewicht des Bewegungsmechanismus, N; v — Bewegungsgeschwindigkeit, m / s; R ist der Radius des Rades, m; r ist der Radius des Radachsenhalses, m; μ – Gleitreibungskoeffizient (μ = 0,08–0,12); f – Rollreibungskoeffizient, m (f = 0,0005 – 0,001 m); η – Effizienz des Bewegungsmechanismus; k – Koeffizient, der die Reibung der Spurkränze auf den Schienen berücksichtigt; i – Übersetzungsverhältnis des Unterwagengetriebes.
Bei einer Reihe von Hebe- und Transportmechanismen erfolgt die Bewegung nicht in horizontaler Richtung. Auch der Einfluss von Windlast etc. ist möglich. Die Formel zur Bestimmung der Leistung kann in diesem Fall wie folgt dargestellt werden:

Zusätzlich gekennzeichnet: α – der Neigungswinkel der Führungen zur horizontalen Ebene; F – spezifische Windlast, N/m2; S ist die Fläche, auf die der Winddruck in einem Winkel von 90° einwirkt, m2.
In der letzten Formel charakterisiert der erste Term die Motorwellenleistung, die erforderlich ist, um die Reibung während der horizontalen Bewegung zu überwinden; Der zweite Term entspricht der Auftriebskraft, der dritte ist der Leistungsanteil aus der Windlast.
Eine Reihe von Kränen verfügen über einen Drehteller, auf dem sich die Arbeitsgeräte befinden. Die Bewegung der Plattform wird über ein darauf montiertes Zahnrad (Drehteller) mit einem Durchmesser Dkp übertragen. Zwischen der Plattform und der festen Basis befinden sich Rollen (Rollen) mit einem Durchmesser von dp. In diesem Fall ergeben sich die Leistung und das Drehmoment des Kranmotors aufgrund der Reibungskräfte ähnlich wie bei der Hin- und Herbewegung, nämlich:

Hier zusätzlich zu den bekannten Werten: G2 ist das Gewicht des Plattenspielers mit der gesamten darauf befindlichen Ausrüstung, N; ωl – Winkelgeschwindigkeit, Plattformen, rad/s; in – Übersetzungsverhältnis des Schwenkmechanismusgetriebes und des Antriebszahnrads des Getriebes – Drehteller.

Bei der Ermittlung der Leistung des Kran-Elektroantriebs ist in manchen Fällen die Laständerung bei Arbeiten am Hang zu berücksichtigen. Die Windlast auf die Drehmechanismen wird unter Berücksichtigung der unterschiedlichen Windkräfte ermittelt, die auf die Last, den Kranausleger und das Gegengewicht wirken.
Bei der Auslegung elektrischer Antriebe für Kranmechanismen wird am Ende der Motorauswahl der elektrische Antrieb auf zulässige Beschleunigungswerte überprüft, deren Daten in Tabelle 1 aufgeführt sind
Tabelle 1 Name der Mechanismen und ihr Zweck
Der Name der Mechanismen und ihr Zweck Beschleunigung, m / s2 Hebemechanismen zum Heben von flüssigen Metallen, zerbrechlichen Gegenständen, Produkten und verschiedenen Montagearbeiten 0,1 Hebemechanismen von Parks von Montage- und Metallurgiewerkstätten 0,2 – 0,5 Hebemechanismen von Greifkränen 0,8 Mechanismen für Bewegung von Kränen, die für Präzisionsmontagearbeiten und den Transport von flüssigen Metallen und zerbrechlichen Gegenständen bestimmt sind 0,1 – 0,2 Bewegungsmechanismen mit der Anziehungskraft der Schwerkraft bei voller Schwerkraft 0,2 – 0,7 Vollgriff-Kranwagen 0,8 – 1,4 Krandrehgelenke 0,5 – 1,2