Starten eines Motors mit gewickeltem Rotor
Die Starteigenschaften des Asynchronmotors hängen von den Eigenschaften seiner Konstruktion, insbesondere von der Rotorvorrichtung, ab.
Der Start eines Induktionsmotors geht mit einem Übergangsprozess der Maschine einher, der mit dem Übergang des Rotors von einem Ruhezustand in einen Zustand gleichmäßiger Rotation verbunden ist, in dem das Drehmoment des Motors das Moment der Widerstandskräfte ausgleicht die Welle der Maschine.
Beim Starten eines Asynchronmotors kommt es zu einem erhöhten Verbrauch elektrischer Energie aus dem Versorgungsnetz, die nicht nur zur Überwindung des an der Welle anliegenden Bremsmoments und zur Deckung der Verluste im Asynchronmotor selbst, sondern auch zur Vermittlung einer bestimmten Kinetik aufgewendet wird Energie an die beweglichen Glieder der Produktionseinheit. Daher muss der Induktionsmotor beim Starten ein erhöhtes Drehmoment entwickeln.
Bei einem Induktionsmotor mit Rotor hängt das dem Schlupf mit n = 1 entsprechende Anlaufdrehmoment von den Wirkwiderständen der im Rotorkreis eingeführten einstellbaren Widerstände ab.
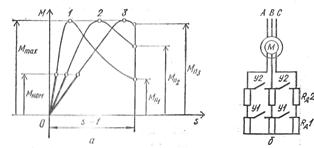
Reis. 1.Starten eines dreiphasigen Asynchronmotors mit gewickeltem Rotor: a – Diagramme der Drehmomentabhängigkeit eines Motors mit gewickeltem Rotor vom Schlupf bei verschiedenen aktiven Widerständen von Widerständen im Rotorkreis, b – eine Schaltung zum Anschließen von Widerständen und zum Schließen von Kontakten für Beschleunigung auf den Rotorkreis.
Also bei geschlossenen Beschleunigungskontakten U1, U2, d.h. beim Starten eines Induktionsmotors mit Kurzschluss von Schleifringen, das anfängliche Anlaufdrehmoment Mn1 = (0,5 -1,0) Mnom und der anfängliche Anlaufstrom Azn = ( 4,5 - 7) Aznom und Andere.
Ein kleines Anlaufdrehmoment eines Asynchron-Elektromotors mit gewickeltem Rotor reicht möglicherweise nicht aus, um eine Produktionseinheit anzutreiben und anschließend zu beschleunigen, und ein erheblicher Anlaufstrom führt zu einer erhöhten Erwärmung der Motorwicklungen, was die Schaltfrequenz und in Netzwerken begrenzt Bei geringer Leistung kommt es zu einem vorübergehenden Spannungsabfall, der für den Betrieb anderer Empfänger unerwünscht ist. Diese Umstände können der Grund dafür sein, dass die Verwendung von Induktionsmotoren mit gewickeltem Rotor und hohem Anlaufstrom zum Antrieb von Arbeitsmechanismen ausgeschlossen ist.

Durch die Einführung einstellbarer Widerstände im Rotorkreis des Motors, sogenannte Anlaufwiderstände, wird nicht nur der anfängliche Anlaufstrom verringert, sondern gleichzeitig auch das anfängliche Anlaufdrehmoment erhöht, das das maximale Drehmoment Mmax (ursprünglich 1, a, Kurve 3), wenn der kritische Schlupf des Phasenläufermotors
skr = (R2' + Rd') / (X1 + X2′) = 1,
wobei Rd' der aktive Widerstand des Widerstands in der Phase der Rotorwicklung des Motors ist, reduziert auf die Phase der Statorwicklung.Eine weitere Erhöhung des aktiven Widerstands des Startwiderstands ist unpraktisch, da dies zu einer Abschwächung des anfänglichen Startdrehmoments und zum Verlassen des Punktes des maximalen Drehmoments im Schlupfbereich s > 1 führt, was die Möglichkeit einer Beschleunigung des Rotors ausschließt.
Der erforderliche aktive Widerstand der Widerstände zum Starten eines Phasenrotormotors wird auf der Grundlage der Startanforderungen bestimmt, die gering sein können, wenn Mn = (0,1 – 0,4) Mnom, normal, wenn Mn – (0,5 – 0,75) Mn, und schwerwiegend bei Mn ≥ I.
Um bei einem Phasenläufermotor während der Beschleunigung einer Produktionseinheit ein ausreichend großes Drehmoment aufrechtzuerhalten, um die Dauer des Einschwingvorgangs zu verkürzen und die Erwärmung des Motors zu reduzieren, ist es notwendig, den Wirkwiderstand schrittweise zu reduzieren der Anlaufwiderstände. Zulässige Drehmomentänderung während der Beschleunigung M (t), bestimmt durch elektrische und mechanische Bedingungen, die die Spitzendrehmomentgrenze M> 0,85 Mmax, das Schaltmoment M2 >> Ms (Abb. 2) sowie die Beschleunigung begrenzen.

Reis. 2. Anlaufeigenschaften eines Drehstrom-Asynchronmotors mit bewickeltem Rotor

Das Einschalten der Startwiderstände wird durch sukzessives Einschalten der Beschleuniger Y1 bzw. Y2 zu den Zeitpunkten t1, t2 sichergestellt, gerechnet ab dem Zeitpunkt des Motorstarts, wenn beim Beschleunigen das Drehmoment M gleich dem Schaltmoment M2 wird. Daher sind während des gesamten Anlaufvorgangs alle Spitzenmomente gleich und alle Schaltmomente untereinander gleich.
Da Drehmoment und Strom des Asynchronmotors mit bewickeltem Rotor miteinander zusammenhängen, ist es möglich, die Spitzenstromgrenze während der Rotorbeschleunigung I1 = (1,5 – 2,5) Aznom und den Schaltstrom Az2 einzustellen, der den Schaltmoment M2 gewährleisten soll > M.°C.
Die Abschaltung von Asynchronmotoren mit bewickeltem Rotor vom Versorgungsnetz erfolgt immer bei Kurzschluss des Rotorkreises, um das Auftreten von Überspannungen in den Phasen der Statorwicklung zu vermeiden, die die Nennspannung dieser Phasen um übersteigen können 3 – 4 Mal, wenn der Rotorkreis zum Zeitpunkt des Motorstopps geöffnet ist.
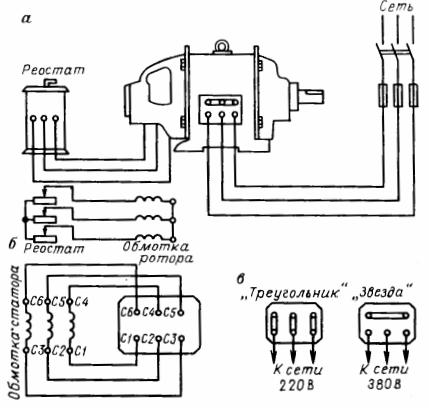
Reis. 3. Anschlussschema der Motorwicklungen mit einem Phasenrotor: a – an das Stromnetz, b – Rotor, c – an der Klemmenleiste.
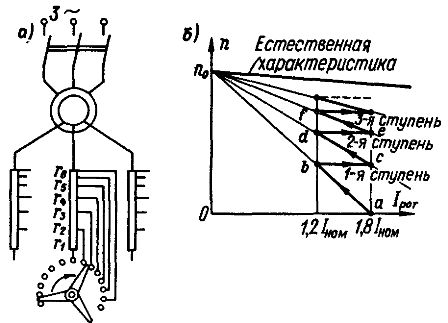
Reis. 4. Starten des Motors mit Phasenrotor: a – Schaltkreis, b – mechanische Eigenschaften