Berührungslose Sensoren für die Position von Mechanismen
 In diesem Artikel werden wir über Positionssensoren von Mechanismen sprechen. Grundsätzlich besteht die Hauptfunktion eines jeden Sensors darin, ein Signal zu geben, wenn ein bestimmtes Ereignis eintritt. Das heißt, wenn ein Triggerereignis auftritt, wird der Sensor aktiviert und erzeugt ein Signal, das analog oder diskret oder digital sein kann.
In diesem Artikel werden wir über Positionssensoren von Mechanismen sprechen. Grundsätzlich besteht die Hauptfunktion eines jeden Sensors darin, ein Signal zu geben, wenn ein bestimmtes Ereignis eintritt. Das heißt, wenn ein Triggerereignis auftritt, wird der Sensor aktiviert und erzeugt ein Signal, das analog oder diskret oder digital sein kann.
Grenzsensoren werden seit vielen Jahrzehnten als Positionssensoren eingesetzt. Schalter. Sie bestehen aus elektrischen Kontakten, die sich mechanisch öffnen oder schließen, wenn eine Variable (Position) einen bestimmten Wert erreicht. Endschalter verschiedener Art sind ein wichtiger Bestandteil vieler Steuerungssysteme, deren Zuverlässigkeit von ihnen abhängt. Solche Sensoren enthalten bewegliche mechanische Elemente, deren Ressourcen begrenzt sind.
Endschalter werden derzeit aktiv durch verschiedene Näherungssensoren ersetzt. Am häufigsten sind Näherungssensoren der folgenden Typen: induktiv, Generator, Magnetoherkon und fotoelektronisch. Diese Sensoren haben keinen mechanischen Kontakt mit dem bewegten Objekt, dessen Position überwacht wird.
Berührungslose Positionssensoren sorgen für eine hohe Geschwindigkeit und hohe Einschaltfrequenz des Mechanismus. Ein gewisser Nachteil dieser Sensoren ist die Abhängigkeit ihrer Genauigkeit von Änderungen der Versorgungsspannung und der Temperatur. Je nach Anforderung kann das Ausgabegerät dieser Geräte wie folgt aussehen kontaktloses LogikelementUnd elektrisches Relais.
In Präzisionsbremssystemen elektrischer Antriebe können Näherungssensoren sowohl zum Befehlen eines Herunterschaltens als auch eines Endstopps eingesetzt werden.
Heutzutage gibt es viele Arten von Sensoren auf dem Markt, aber im Rahmen dieses Artikels werden wir das Thema direkt induktive Positionssensoren beleuchten, da in mehr als 80 % der Fälle induktive Sensoren als Sensoren für die Position von Mechanismen dienen.
Der induktive Sensor wird ausgelöst, wenn sich das Metall seiner Auslösezone nähert. Aus diesem Grund werden induktive Positionssensoren auch als Präsenzsensoren, Näherungssensoren oder einfach als induktive Schalter bezeichnet.
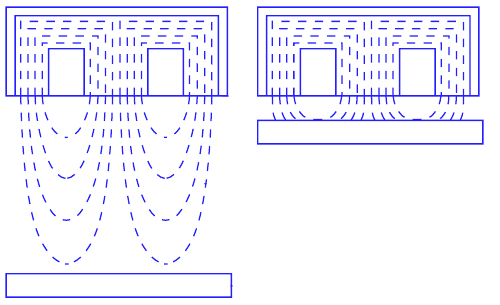
Betrachten wir nun das Funktionsprinzip eines induktiven Sensors. Wie oben erwähnt, wird der Sensor aktiviert, wenn sich das Metall nahe genug an der Auslösezone befindet. Dieses Phänomen besteht in der Interaktion der Beteiligten Induktoren Wenn sich ihm Metall nähert, ändert sich die Größe des Magnetfelds der Spule stark, was zur Aktivierung des Sensors führt. Dieser wird ausgelöst und an seinem Ausgang erscheint das entsprechende Signal.
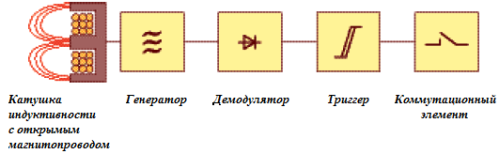
Der elektronische Teil des Gerätes enthält eine Steuerschaltung, die wiederum einen Relais- oder Transistorschalter steuert. Es besteht aus folgenden Teilen:
-
Ein Generator, der ein elektromagnetisches Feld erzeugt, das für die Interaktion mit einem Objekt erforderlich ist.
-
Schmitt-Trigger mit Schalthysterese.
-
Ein Verstärker, der die Amplitude des Signals erhöht, damit es den erforderlichen Ansteuerwert erreicht.
-
LED-Anzeige informiert über den Status des Schalters. Es bietet auch Leistungsüberwachung und Konfiguration.
-
Verbindung zum Schutz gegen das Eindringen von Feststoffpartikeln und Wasser.
-
Gehäuse zur Montage des Sensors und zum Schutz vor verschiedenen mechanischen Einflüssen. Es besteht aus Messing oder Polyamid und ist mit Befestigungselementen versehen.
Induktive Positionssensoren werden häufig in industriellen Automatisierungssystemen eingesetzt, wo es notwendig ist, die Position eines beliebigen Teils des Mechanismus regelmäßig oder ständig zu bestimmen. Der Sensor erzeugt ein Signal, das an den Antrieb gesendet wird. Als ausführender Mechanismus können ein Starter, eine Steuerung, ein Relais, ein Frequenzumrichter usw. fungieren. Hauptsache, die Parameter des Sensors entsprechen den Parametern des Antriebs hinsichtlich Spannung und Strom.
Bei den meisten Sensoren handelt es sich nicht um Leistungsgeräte, sondern in erster Linie um Signalgeräte, daher schaltet der Sensor selbst in der Regel nichts Mächtiges, sondern steuert nur, gibt ein Steuersignal, fungiert als Aktionsauslösegerät, das bereits angeschlossen werden kann zum Leistungsschalten.
Moderne induktive Positionssensoren sind meist in zwei Ausführungen mit Kunststoff- oder Metallgehäusen erhältlich: rechteckig oder zylindrisch. Der Durchmesser des Sensors mit kreisförmigem Querschnitt kann zwischen 4 und 30 mm liegen, die am häufigsten verwendeten Durchmesser sind jedoch 18 und 12 mm.
Bei der Montage des Sensors an Geräten wird zwischen der Metallplatte und der Betätigungszone des Sensors ein Spalt eingestellt, der in der Regel den Durchmesser des Sensors nicht überschreitet und in der Regel 2-3 mal kleiner ausfällt sein Durchmesser.
Induktive Positionssensoren können je nach Anschlussart Zweileiter, Dreileiter, Vierleiter und Fünfleiter sein.
Zweileiter schalten die Last direkt, z Starterspule, das heißt, sie funktionieren wie ein herkömmlicher Schalter. Zweidrahtsensoren erfordern einen Lastwiderstand, daher sind sie nicht immer als zuverlässiges Werkzeug geeignet, verlieren aber nicht an Relevanz.
Die Last wird einfach in Reihe mit dem Sensor geschaltet, bei konstanter Spannung ist auf die Polarität zu achten, bei wechselnder Polarität kommt es vor allem auf die geschaltete Leistung und den Strom an.
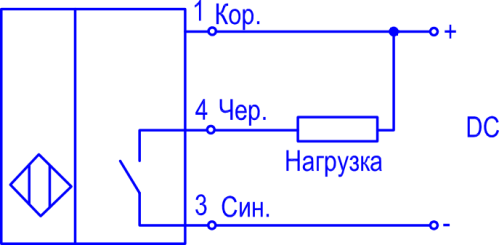
Dreileiter-Sensoren verfügen über einen dritten Draht zur Stromversorgung des Sensors selbst, und dies ist die beliebteste Lösung. Vier- und Fünfleiter-Sensoren verfügen über Transistor- oder Relaisausgänge zum Anschluss der Last, und über die fünfte Leitung können Sie den Betriebsmodus des Sensors und den Ausgangszustand der Ausgänge auswählen.
Da die Ausgänge sowohl Relais- als auch Transistorausgänge sein können, werden die Sensoren entsprechend der Anordnung der Ausgänge in drei Typen unterteilt: Relais, NPN und PNP.
Sensoren mit Relaisausgang
Ein Sensor mit Relaisausgang verfügt über eine galvanische Trennung des Versorgungsstromkreises vom enthaltenen Stromkreis. Es schaltet einen Draht und die Spannung im geschalteten Stromkreis ist nicht besonders kritisch. Da der Stromversorgungskreis des Sensors galvanisch getrennt ist, kann dies als Vorteil des Relaissensors angesehen werden. Sensoren dieser Art sind in der Regel groß.
Sensoren mit PNP-Transistorausgang
Der Sensor verfügt am Ausgang über einen pnp-Transistor, der die Plusleitung mit der Last kommutiert. An den Kollektorkreis des Ausgangs-PNP-Transistors ist eine Last angeschlossen, die über ihre zweite Leitung dauerhaft mit Minus verbunden ist.
Sensoren mit NPN-Transistorausgang
Der Sensor verfügt am Ausgang über einen NPN-Transistor, der die Minusleitung mit der Last kommutiert. An den Kollektorkreis des Ausgangs-npn-Transistors ist eine Last angeschlossen, die mit ihrer zweiten Leitung dauerhaft mit der Plusleitung verbunden ist.
Je nach Ausgangszustand der Ausgänge können induktive Positionssensoren Öffner- oder Schließerkontakte sein. Der Ausgangszustand bedeutet, dass dieser Zustand in dem Moment vorliegt, in dem der Sensor noch nicht ausgelöst, also nicht aktiviert ist.
Wenn die Ausgangskontakte normalerweise geschlossen sind, wird die Last im Leerlauf angeschlossen. Wenn sie normalerweise offen sind, wird die Last bis zum Auslösen des Sensors abgeschaltet und dem Antrieb (z. B. dem Schütz) wird kein Strom zugeführt. Normalerweise geschlossene Kontakte werden im englischen Format bezeichnet – N.C. (Normalerweise geschlossen), Normalerweise offen – N.O. (Normalerweise geöffnet).
Somit gibt es vier Typen von Sensoren mit Transistorausgängen: zwei Typen entsprechend der Leitfähigkeit (pnp oder npn) und zwei Typen entsprechend dem Ausgangszustand der Ausgänge. Es kann auch zu Verzögerungen beim Ein- und Ausschalten kommen.

Abhängig von der Art des Antriebs, der an den Sensor angeschlossen ist, sowie der Art der Stromversorgung kann die Logik des Sensors positiv oder negativ sein. Dies ist auf den Spannungspegel zurückzuführen, der den Eingang des Geräts aktiviert.
Wenn der Eingang aktiviert wird, wenn das Minuskabel des Aktuators mit Masse, mit Minus, verbunden ist, wird die Logik als negativ bezeichnet. Eine solche Verbindung ist charakteristisch für Sensoren mit Transistorausgängen vom NPN-Typ.
Positive Logik entspricht dem Verbinden des Pluskabels des Antriebs mit der positiven Stromversorgung bei Aktivierung. Diese Logik ist typisch für Sensoren mit PNP-Transistorausgängen. Meistens gibt es eine positive Logik für den Betrieb induktiver Sensoren für die Position der Mechanismen.
Ältere, am häufigsten verwendete Typen induktiver Positionssensoren
Induktive Positionssensoren IKV-22
Induktive Sensoren IKV-22. Die Funktionsweise dieser Sensoren basiert auf dem Prinzip der Änderung des induktiven Widerstands von Spulen mit Stahlkern, wenn sich der Luftspalt im Magnetkreis ändert.
Auf einer Stahlplatte ist ein Magnetkreis mit zwei Spulen montiert und mit einer Kunststoffabdeckung verschlossen. Zwei MBGP-Kondensatoren (einer mit einer Kapazität von 15 μF, 200 V, der andere mit einer Kapazität von 10 μF, 400 V) sind von der Unterseite auf die Platte angebracht. Die Kondensatoren sind mit einer Abdeckung abgedeckt. Der Anschluss des Kabels erfolgt über die Dichtung. Auf dem Mechanismus ist ein magnetischer Shunt installiert, dessen Abmessungen mindestens sein müssen: Dicke 2 mm, Breite 80 mm, Länge 140 mm. Der Luftspalt zwischen Magnetkreis und Shunt beträgt 6 ± 4 mm.
Das Ausgangsrelais wird normalerweise in dem Moment ein- und ausgeschaltet, in dem der magnetische Shunt den Sensor passiert, wenn aufgrund einer Änderung des induktiven Widerstands der Spule eine Stromresonanz auftritt und der Strom durch die Relaisspule abfällt. Diese Relais: Typ MKU-48, 12 V AC, Aufnahmestrom nicht mehr als 0,45 A, Abfallstrom nicht weniger als 0,1 A.Die Versorgungsspannung des Sensorkreises beträgt 24 V AC-Relais.
Induktive Positionssensoren ID-5
In metallurgischen Werkstätten werden induktive Sensoren vom Typ ID-5 verwendet, die für den Betrieb bei Umgebungstemperaturen bis + 80 ° C und einer Luftfeuchtigkeit bis 100 % ausgelegt sind. Leitfähiger Staub und Zunder sind akzeptabel. Für den Sensor wird ein Halbleiter-Ausgangsverstärker vom Typ UID-10 verwendet. Die Ausgangsleistung des Verstärkers (25 W) reicht aus, um die weit verbreiteten REV-800-Relais, Schütze KP21, MK-1 usw. einzuschalten.
Der Luftspalt zwischen Sensor und beobachtetem ferromagnetischem Objekt kann bis zu 30 mm betragen. Die Abmessungen des ID-5-Sensors betragen 187x170x70 mm, die Versorgungsspannung beträgt 220 V ± 15 %, 50 Hz.
Kleine kontaktlose BSP-Schalter
Kleine Bewegungsschalter BSP-2 (mit berührungslosem Ausgang, zum Logikelement) und BRP (mit Ausgang zum Relais PE-21, 24 V, 16 Ohm) werden auf Metallschneidemaschinen verwendet.
Der BSP-2-Schalter besteht aus einem Differenztransformatorsensor und einem Halbleiterauslöser. Das Magnetsystem der ersten Sensorspule wird durch eine Stahlplatte bewegt, und die zweite Spule wird manipuliert, während sie sich über ihr Magnetsystem bewegt, das mit dem flachen Ankermechanismus verbunden ist. Die Spulen werden in die entgegengesetzte Richtung eingeschaltet.
Befindet sich der Anker über dem Sensor, sind die induktiven Reaktanzen der Spulen gleich und der Sensorausgang des Differentialtransformators ist Null. In diesem Fall erscheint am Ausgang des Triggers eine Spannung von mindestens 2,5 V, die ausreicht, damit das Logikelement funktioniert.
Wenn über dem Sensor kein Anker vorhanden ist, wird eine Spannung an den Auslöser angelegt, die ihn in seinen ursprünglichen Zustand zurückversetzt. Dann ist das Ausgangssignal des Schalters Null.
Das Funktionsprinzip des BRP-Schalters ähnelt in vielerlei Hinsicht dem des BSP-2. Im Inneren der Box sind ein induktiver Sensor (entsprechend der Schaltung des Differentialtransformators), ein Auslöser und ein Verstärker verbaut. Sekundärspulen mit unterschiedlicher Windungszahl werden in entgegengesetzter Richtung eingeschaltet. Da der Anker das Magnetsystem des Sensors überlappt, nimmt das Signal ab und nach dem Wechsel der Phase wird der Auslöser geschaltet und ein externes Ausgangsrelais (PE-21, 24 V, 16 Ohm) aktiviert.
Der am Mechanismus befestigte Anker hat die Abmessungen 80x15x3 mm. Der Spalt zwischen Anker und Sensor beträgt 4 mm. Die Genauigkeit der Schalter im Nennmodus beträgt ± 0,5 mm, die Betätigungsdifferenz beträgt maximal 5 mm. Bei. Schwankungen der Versorgungsspannung und der Temperatur kann der Fehler von BSP-2- und BRP-Schaltern ± (2,5-f-3,0) mm erreichen.
Hochfrequenz-Induktivsensoren VKB
Auch für die Automatisierung von Zerspanungsmaschinen werden hochpräzise induktive Sensoren vom Typ VKB mit U-förmigem oder flachem Anker eingesetzt. Die Pole des eingebauten Transformators bilden ein offenes elektromagnetisches System. Der Arbeitsluftspalt beträgt 0,1-0,15 mm.
Die Ausgangsspannung der Sekundärwicklung des Transformators wird einer Differenzmessschaltung und dann einem Transistorverstärker zugeführt. Der Gesamtfehler des Sensors bei Temperaturschwankungen von 5 bis 40 °C und einer Spannung von 85 bis 110 % des Nennwerts beträgt ± (0,064-0,15) mm, der Ansprechunterschied überschreitet 0,4 mm nicht. Die maximale Bewegungsgeschwindigkeit des Mechanismus beträgt 10 m/mm. Sensorabmessungen 62x34x24 mm. Versorgungsspannung 12 V.
Spezielle Typen von Präzisionsinduktivsensoren für Zerspanungsmaschinen mit Differentialschaltung haben einen Fehler von weniger als ± 0,01 mm.Zu diesen Sensoren gehört ein berührungsloser Bewegungsschalter vom Typ VPB12, bestehend aus einer Sensoreinheit auf einer Elektronikeinheit. Die Sensoreinheit umfasst einen induktiven Arbeitssensor, einen induktiven Kompensationssensor und Leiterplatten. Der Mechanismus ist montiert: Steuerferritelement. Versorgungsspannung 12 V DC. Der maximale Belichtungsabstand beträgt nicht mehr als 0,12 mm. An den Sensorausgang kann ein Relais vom Typ RPU-0 angeschlossen werden. Der maximale Laststrom des Ausgabegeräts beträgt 0,16 A.
Generatorpositionssensoren
Sensoren dieser Art sind kompakt und sehr genau. Bewährt haben sich Sensorgeneratoren der Serien KVD-6M und KVD-25 (mit Steckplätzen), KVP-8 und KVP-16 (Flugzeuge). Sie eignen sich für den Einsatz bei hohen Feuchtigkeits- und Staubkonzentrationen. Die Elemente der Transistorschaltung des Sensors (Generator und Auslöser) befinden sich in einem Gehäuse aus schlagfestem Polystyrol. Die Versiegelung erfolgt mit einer kalthärtenden Masse. Der Betriebstemperaturbereich liegt zwischen — 30 und +50 °C.
Der HPC-Sensor erzeugt ein diskretes Signal, wenn eine Metallplatte („Flagge“) den Schlitz passiert, was zu einem Zusammenbruch der Erzeugung und Umschaltung des Auslösers führt. Die Breite des Schlitzes beträgt 6 mm für den KVD-6M-Sensor und 25 mm für den KVD-25-Sensor.
Die Sensoren KVP-8 und KVP-16 werden aktiviert, wenn eine Metallplatte in einem maximalen Abstand von 8 bzw. 16 mm an ihnen vorbeifährt.