Das Funktionsprinzip und das Gerät des Elektromotors
Jeder Elektromotor ist dafür ausgelegt, durch den Verbrauch von ihm zugeführter Elektrizität mechanische Arbeit zu verrichten, die üblicherweise in eine Drehbewegung umgewandelt wird. Obwohl es in der Technik Modelle gibt, die sofort eine translatorische Bewegung des Arbeitskörpers erzeugen. Diese werden Linearmotoren genannt.
In Industrieanlagen treiben Elektromotoren verschiedene Metallbearbeitungsmaschinen und mechanische Geräte an, die am technologischen Produktionsprozess beteiligt sind.
In Haushaltsgeräten treiben Elektromotoren Waschmaschinen, Staubsauger, Computer, Haartrockner, Kinderspielzeug, Uhren und viele andere Geräte an.

Grundlegende physikalische Prozesse und Wirkprinzip
Beim Umzug nach innen Magnetfeld Elektrische Ladungen, die als elektrische Ströme bezeichnet werden, haben immer eine mechanische Kraft, die dazu neigt, ihre Richtung in einer Ebene senkrecht zur Ausrichtung der magnetischen Feldlinien abzulenken.Wenn ein elektrischer Strom durch einen Metalldraht oder eine daraus hergestellte Spule fließt, neigt diese Kraft dazu, jeden stromführenden Draht und die gesamte Spule als Ganzes zu bewegen/drehen.
Das Foto unten zeigt einen Metallrahmen, durch den Strom fließt. Ein darauf angelegtes Magnetfeld erzeugt für jeden Zweig des Rahmens eine Kraft F, die eine Drehbewegung erzeugt.

Diese Eigenschaft der Wechselwirkung elektrischer und magnetischer Energie, die auf der Entstehung einer elektromotorischen Kraft in einem geschlossenen Stromkreis beruht, kommt bei jedem Elektromotor zum Einsatz. Sein Design umfasst:
-
eine Spule, durch die ein elektrischer Strom fließt. Es wird auf einem speziellen Ankerkern platziert und in Drehlagern fixiert, um den Widerstand gegen Reibungskräfte zu reduzieren. Diese Konstruktion wird Rotor genannt;
-
Stator, der ein Magnetfeld erzeugt, das mit seinen Kraftlinien elektrische Ladungen durchdringt, die entlang der Windungen der Rotorwicklung verlaufen;
-
Gehäuse zur Platzierung des Stators. Im Inneren des Gehäuses sind spezielle Sitze angebracht, in denen die Außenkäfige der Rotorlager montiert sind.
Der vereinfachte Aufbau des einfachsten Elektromotors lässt sich durch ein Bild der folgenden Form darstellen.

Wenn sich der Rotor dreht, wird ein Drehmoment erzeugt, dessen Leistung von der allgemeinen Konstruktion des Geräts, der Menge der zugeführten elektrischen Energie und deren Verlusten bei der Umwandlung abhängt.
Der Betrag der maximal möglichen Drehmomentleistung des Motors ist immer kleiner als die ihm zugeführte elektrische Energie. Es wird durch den Effizienzwert charakterisiert.
Arten von Elektromotoren
Je nach Art des Stroms, der durch die Spulen fließt, werden sie in Gleichstrom- oder Wechselstrommotoren unterteilt.Jede dieser beiden Gruppen weist eine Vielzahl von Modifikationen auf, die unterschiedliche technologische Verfahren nutzen.
Gleichstrommotoren
Sie verfügen über ein Statormagnetfeld, das von einem stationären Festkörper erzeugt wird Permanentmagnete oder spezielle Elektromagnete mit Erregerspulen. Die Ankerspule ist fest in der Welle montiert, die gelagert ist und sich frei um die eigene Achse drehen kann.
Der prinzipielle Aufbau eines solchen Motors ist in der Abbildung dargestellt.

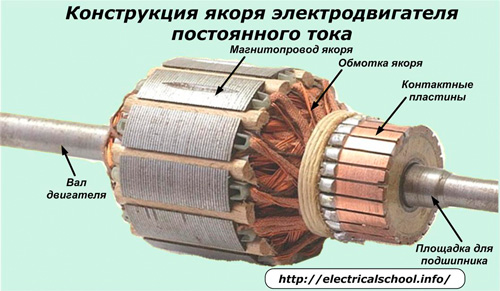
Auf dem Kern des Ankers aus ferromagnetischen Materialien befindet sich eine Spule, die aus zwei in Reihe geschalteten Teilen besteht, die an einem Ende mit den leitenden Kollektorplatten verbunden und am anderen Ende miteinander verbunden sind. Zwei Graphitbürsten befinden sich an diametral gegenüberliegenden Enden des Ankers und werden gegen die Kontaktflächen der Kollektorplatten gedrückt.
An die untere Musterbürste wird ein positives Gleichstromquellenpotential angelegt, an die obere ein negatives Potential. Die Richtung des durch die Spule fließenden Stroms wird durch einen gestrichelten roten Pfeil angezeigt.
Der Strom bewirkt, dass das Magnetfeld unten links am Anker einen Nordpol und oben rechts am Anker einen Südpol hat (kardanische Regel). Dies führt zu einer Abstoßung der Rotorpole von den gleichnamigen stationären Polen und einer Anziehung zu den gegenüberliegenden Polen des Stators. Durch die ausgeübte Kraft entsteht eine Rotationsbewegung, deren Richtung durch einen braunen Pfeil angezeigt wird.
Bei weiterer Drehung des Ankers durch Trägheit werden die Pole auf andere Kollektorplatten übertragen. Die Stromrichtung in ihnen ist umgekehrt. Der Rotor dreht sich weiter.
Der einfache Aufbau einer solchen Kollektorvorrichtung führt zu großen Verlusten an elektrischer Energie.Solche Motoren funktionieren in Geräten einfacher Bauart oder in Spielzeugen für Kinder.
Die am Produktionsprozess beteiligten Gleichstrom-Elektromotoren sind komplexer aufgebaut:
-
die Spule ist nicht in zwei, sondern in mehrere Teile geteilt;
-
jeder Abschnitt der Spule ist an einem eigenen Pol montiert;
-
Die Kollektorvorrichtung besteht aus einer bestimmten Anzahl von Kontaktflächen entsprechend der Anzahl der Windungen.
Dadurch wird eine reibungslose Verbindung jedes Pols über seine Kontaktplatten zu den Bürsten und der Stromquelle geschaffen und Energieverluste reduziert.
Das Gerät eines solchen Ankers ist auf dem Foto dargestellt.
Bei Gleichstrommotoren kann die Drehrichtung des Rotors umgekehrt werden. Dazu reicht es aus, die Bewegung des Stroms in der Spule durch einen Polaritätswechsel an der Quelle in die entgegengesetzte Richtung zu verändern.
Wechselstrommotoren
Sie unterscheiden sich von früheren Konstruktionen dadurch, dass der in ihrer Spule fließende elektrische Strom durch beschrieben wird sinusförmiges harmonisches Gesetzperiodisch seine Richtung (Vorzeichen) ändert. Um sie mit Strom zu versorgen, wird Spannung von Generatoren mit wechselndem Vorzeichen geliefert.
Der Stator solcher Motoren wird von einem Magnetkreis gebildet. Es besteht aus ferromagnetischen Platten mit Nuten, in denen die Windungen der Spule in einer Rahmenkonfiguration (Spulenkonfiguration) platziert sind.

Synchron-Elektromotoren
Das Foto unten zeigt das Funktionsprinzip eines Einphasen-Wechselstrommotors mit synchroner Drehung der elektromagnetischen Felder von Rotor und Stator.

In den Nuten des Magnetkreises des Stators sind an diametral gegenüberliegenden Enden Wicklungsdrähte angeordnet, schematisch dargestellt in Form eines Rahmens, durch den ein Wechselstrom fließt.
Betrachten wir den Fall des Zeitpunkts, der dem Durchgang des positiven Teils seiner Halbwelle entspricht.
In den Lagerzellen dreht sich ein Rotor mit eingebautem Permanentmagneten frei, in dem das nördliche „N-Maul“ und das südliche „S-Maul“ des Pols klar definiert sind. Wenn eine positive Stromhalbwelle durch die Statorwicklung fließt, entsteht darin ein Magnetfeld mit den Polen „S st“ und „N st“.
Zwischen den Magnetfeldern des Rotors und des Stators entstehen Wechselwirkungskräfte (wobei sich die Pole abstoßen und im Gegensatz zu den Polen anziehen), die dazu neigen, den Motoranker aus jeder Position ins Extrem zu drehen, wenn die gegenüberliegenden Pole so nah wie möglich beieinander liegen andere.
Wenn wir den gleichen Fall betrachten, aber für den Moment, in dem das Gegenteil der Fall ist – eine negative Halbwelle des Stroms fließt durch den Rahmendraht, dann erfolgt die Drehung des Ankers in die entgegengesetzte Richtung.
Um eine kontinuierliche Bewegung des Rotors im Stator zu gewährleisten, wird nicht ein Wickelrahmen hergestellt, sondern eine bestimmte Anzahl davon, da jeder von ihnen von einer separaten Stromquelle gespeist wird.
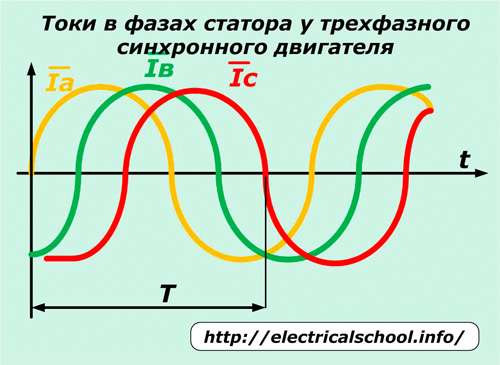
Das Funktionsprinzip eines Drehstrommotors mit synchroner Rotation, die elektromagnetischen Felder von Rotor und Stator sind im folgenden Bild dargestellt.

Bei dieser Konstruktion sind drei Spulen A, B und C im Magnetkreis des Stators montiert, um einen Winkel von 120 Grad zueinander versetzt. Spule A ist gelb markiert, B ist grün und C ist rot. Jede Spule besteht aus den gleichen Rahmen wie im vorherigen Fall.
Im Bild fließt der Strom jedenfalls nur durch eine Spule in Vorwärts- oder Rückwärtsrichtung, was durch die Zeichen „+“ und „-“ angezeigt wird.
Wenn die positive Halbwelle die Phase A in Vorwärtsrichtung durchläuft, nimmt die Achse des Rotorfeldes eine horizontale Position ein, da die Magnetpole des Stators in dieser Ebene gebildet werden und den beweglichen Anker anziehen. Die entgegengesetzten Pole des Rotors neigen dazu, sich den Polen des Stators anzunähern.
Wenn die positive Halbwelle in Phase C übergeht, dreht sich der Anker um 60 Grad im Uhrzeigersinn. Sobald Strom an Phase B angelegt wird, erfolgt eine ähnliche Ankerdrehung. Jeder weitere Stromfluss in der nächsten Phase der nächsten Wicklung dreht den Rotor.
Wenn an jede Wicklung eine um einen Winkel von 120 Grad verschobene dreiphasige Netzspannung angelegt wird, zirkulieren in ihnen Wechselströme, die den Anker drehen und seine synchrone Drehung mit dem angelegten elektromagnetischen Feld erzeugen.
Das gleiche mechanische Design wird erfolgreich in einem dreiphasigen Schrittmotor eingesetzt … Nur in jeder Wicklung durch Steuerung spezieller Controller (Schrittmotortreiber) Gemäß dem oben beschriebenen Algorithmus werden konstante Impulse angelegt und entfernt.
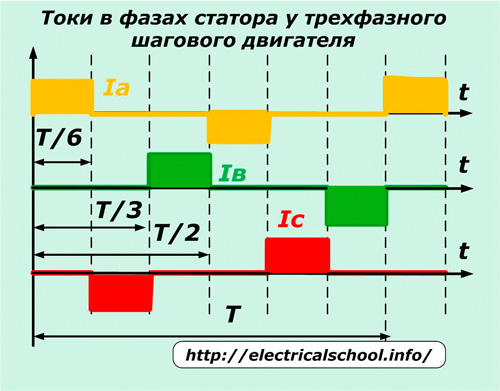
Ihr Start löst eine Drehbewegung aus, und ihre Beendigung zu einem bestimmten Zeitpunkt sorgt für eine gemessene Drehung der Welle und einen Stopp in einem programmierten Winkel, um bestimmte technologische Vorgänge auszuführen.
Bei beiden beschriebenen Drehstromsystemen besteht die Möglichkeit, die Drehrichtung des Ankers zu ändern. Dazu müssen Sie lediglich die Reihenfolge der Phasen „A“ — „B“ — „C“ in eine andere ändern, zum Beispiel „A“ — „C“ — „B“.
Die Geschwindigkeit des Rotors wird durch die Länge der Periode T reguliert. Ihre Verringerung führt zu einer Beschleunigung der Rotation.Die Größe der Amplitude des Stroms in der Phase hängt vom Innenwiderstand der Wicklung und dem Wert der an sie angelegten Spannung ab. Sie bestimmt das Drehmoment und die Leistung des Elektromotors.
Asynchronmotoren
Diese Motorkonstruktionen haben den gleichen Statormagnetkreis mit Wicklungen wie die zuvor diskutierten einphasigen und dreiphasigen Modelle. Sie haben ihren Namen von der asynchronen Rotation der elektromagnetischen Felder von Anker und Stator. Dies geschieht durch eine Verbesserung der Konfiguration des Rotors.
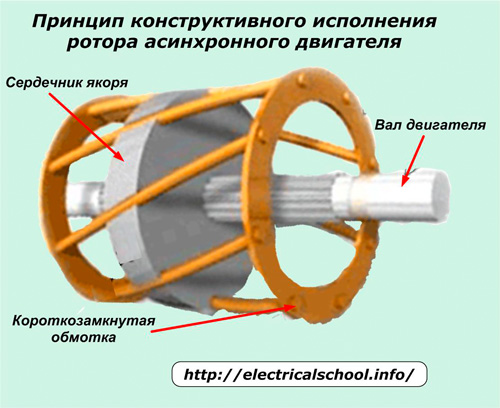
Sein Kern besteht aus gerillten Elektroblechplatten. Sie sind mit Stromleitern aus Aluminium oder Kupfer ausgestattet, die an den Enden des Ankers mit leitfähigen Ringen verschlossen sind.
Wenn Spannung an die Statorwicklungen angelegt wird, wird durch elektromotorische Kraft ein elektrischer Strom in der Rotorwicklung induziert und ein Ankermagnetfeld erzeugt. Wenn diese elektromagnetischen Felder interagieren, beginnt sich die Motorwelle zu drehen.
Bei dieser Konstruktion ist die Bewegung des Rotors erst nach Auftreten eines rotierenden elektromagnetischen Feldes im Stator möglich und läuft mit diesem asynchron weiter.
Asynchronmotoren sind einfacher aufgebaut, daher kostengünstiger und werden häufig in Industrieanlagen und Haushaltsgeräten eingesetzt.

Explosionsgeschützter Elektromotor von ABB
Linearmotoren
Viele Arbeitskörper industrieller Mechanismen führen eine hin- und hergehende oder translatorische Bewegung in einer Ebene aus, die für den Betrieb von Metallbearbeitungsmaschinen, Fahrzeugen, Hammerschlägen beim Rammen von Pfählen ... erforderlich ist.
Das Bewegen eines solchen Arbeitskörpers mittels Getrieben, Kugelumlaufspindeln, Riemenantrieben und ähnlichen mechanischen Vorrichtungen von einem rotierenden Elektromotor aus erschwert die Konstruktion. Die moderne technische Lösung dieses Problems ist der Betrieb eines linearen Elektromotors.
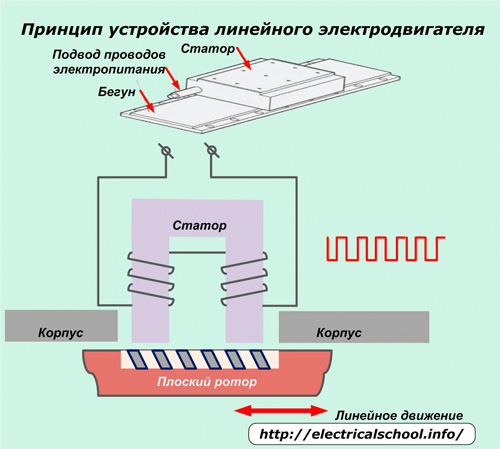
Sein Stator und Rotor sind in Form von Streifen länglich und nicht wie bei Rotationselektromotoren zu Ringen gewickelt.
Das Funktionsprinzip besteht darin, dem Läuferrotor durch die Übertragung elektromagnetischer Energie von einem stationären Stator mit einem offenen Magnetkreis einer bestimmten Länge eine hin- und hergehende lineare Bewegung zu verleihen. Durch sequentielles Einschalten des Stroms entsteht im Inneren ein funktionierendes Magnetfeld.
Es wirkt mit einem Kollektor auf die Ankerwicklung. Die in einem solchen Motor auftretenden Kräfte bewegen den Rotor nur in linearer Richtung entlang der Führungselemente.
Linearmotoren sind für den Betrieb mit Gleichstrom oder Wechselstrom ausgelegt und können im Synchron- oder Asynchronmodus betrieben werden.
Die Nachteile von Linearmotoren sind:
-
die Komplexität der Technologie;
-
hoher Preis;
-
geringe Energieeffizienz.